ABSTRACT
Space the final frontier, has been a elusive dream since the birth of the humankind. After humankind broke out from the limits of Earth and reached space, it inspired us even more. CubeSats provide access to space for a wider audience pushing the frontier once more. As a step towards that future UPSat, the first truly open source in both hardware and software paves the way for a more open and democratized space. \ \ This thesis describes the design, implementation and testing of 2 software modules of UPSat: the command and control module plus the on-board computer software.\ \ The command and control module holds all the reusable software used in the subsystems, a common way to access it through the protocol defined ECSS-E-70-41A specification and implemented in the form of services that each subsystem provides.\ \ The on-board computer, the heart of UPSat provide critical operation and it is responsible for packet routing, housekeeping, timekeeping, the science unit m-NLP and the image acquisition component operation and finally mass storage of logs and configuration parameters.\ \ The software besides the required functionality must be written in a way that is fault tolerant and protected from the radiation induced effects and possible failures and errors.\ \ The primary purpose of this thesis is for the reader to easily comprehend our rational and thought process behind every action so it will give him an insight to our design intentions and hopefully provide the necessary information so that future designs are improved.
SUBJECT AREA: CubeSat.
KEYWORDS: fault tolerance, space, CubeSat, command and control
CONTENTS
1.4 Commercial Off The Shelf Components 22
2.1 Single event effects and rad hard 34
2.1.2 Protection from radiation effects 36
2.2.1 NASA state of the art 37
2.3 Command and control module 41
2.4 Safety critical software 44
2.5.1 Fault tolerant mechanisms 46
2.5.3 Single point of failure 46
2.5.4 State of the art fault tolerance 47
2.5.5 Fault tolerance in hardware 48
2.5.6 Fault tolerance in software 49
3.1 Coding standards on UPSat 50
3.2 Fault tolerance on UPSat 51
3.3.2 OBC real time constraints 54
3.3.3 RTOS Vs baremetal and FreeRTOS 55
3.3.5 Introduction to FreeRTOS 56
3.3.8 Stack overflow detection 58
3.3.11 Logging and file system 58
3.4.4 Services in subsystems 66
3.4.6 Telecommand verification service 66
3.4.11 Housekeeping & diagnostic data reporting service 70
3.4.12 Function management service 71
3.4.13 Large data transfer service 72
3.4.14 On-board storage and retrieval service 74
4.2 Project folder organization 79
4.7 Hardware abstraction layer 84
4.11.2 ECSS packet structure 92
4.12 Service utilities module 96
4.14 Telecommand verification service module 98
4.15 Event reporting service module 99
4.16 Housekeeping & diagnostic data reporting service module 100
4.17 Function management service module 101
4.18 Time management service module 102
4.19 Large data transfer service module 104
4.20 Mass storage service module 105
4.20.1 Note on mass storage and large data services 107
4.21 SatNOGS client command and control module 109
5.5 Command and control testing software 118
5.6 SatNOGS client, command and control module 120
5.7 Debug tools, techniques 120
5.8 RTOS and services timing analysis 124
5.8.3 Packet processing time analysis 124
5.8.4 Packet pool timestamp 125
5.10 System operation test 129
5.13 Environmental testing 132
LIST OF FIGURES
Figure 1.1 CubeSat unit specification 22
Figure 1.4 QB50 targets [8] 25
Figure 1.5 UPSat subsystems. 27
Figure 1.6 UPSat subsystems diagram 28
Figure 1.7 COMMS subsystem [6] 29
Figure 2.1 Missions with radiation issues [25] 34
Figure 2.2 SEE classification [49] 35
Figure 2.3 Cost of 2Mbytes rad-hard SRAM [30] 36
Figure 2.4 Argos testbed rad-hard board SEU [43 36
Figure 2.5 Argos testbed COTS board SEU [43] 36
Figure 2.6 SwissCube exploded view [45] 38
Figure 2.7 PhoneSat 2.0 data distribution architecture 40
Figure 2.8 i-INSPIRE II CubeSat [47] 40
Figure 2.9 i-INSPIRE II software state machine [47] 40
Figure 2.11 ECSS TC frame header 42
Figure 2.12 ECSS TC data header 42
Figure 2.13 Fault tolerance mechanisms [29] 47
Figure 2.14 Hardware fault tolerance [26] 48
Figure 2.15 B777 flight computer [57] 48
Figure 2.16 AIRBUS A320-40 flight computer [57] 49
Figure 3.2 tasks life cycle [12] 58
Figure 3.3 FAT file system structure [60] 59
Figure 3.4 FatFS critical operations [32] 60
Figure 3.5 FatFS optimized critical operations [32] 60
Figure 3.8 Large data transfer split of the original packet 73
Figure 4.1 OBC’s CubeMX project 78
Figure 4.2 Project organization 79
Figure 4.3 The life of a packet 110
Figure 4.4 On-board computer software diagram 111
Figure 5.1 ADCS IMU communication debugging in a logic analyzer 116
Figure 5.3 UPSat command and control 120
Figure 5.4 Example use of a breakpoint 121
Figure 5.5 Systemview events display 123
Figure 5.6 OBC extended WOD communications 126
Figure 5.7 Delay before task notification fix 127
Figure 5.8 Delay after task notification fix 127
Figure 5.9 Mass storage service WOD storage 128
\ LIST OF IMAGES
Image 1.1 SatNOGS rotator [4] 24
Image 1.2 UPSat subsystems mounted in the aluminum structure 28
Image 1.3 UPSat’s umbilical connector and remove before flight switch 28
Image 1.4 The antenna deployment system 29
Image 1.5 OBC subsystem during testing 30
Image 1.6 OBC and ADCS subsystem 31
Image 1.7 ADCS subsystem unpopulated PCB 31
Image 1.8 ADCS Spin-Torquer 31
Image 1.9 EPS subsystems PCBs 32
Image 1.10 The EPS PCB with the battery pack mounted 32
Image 1.11 Solar panel used in UPSat along with a SU probe 32
Image 1.12 The science unit m-NLP 33
Image 1.13 The DART4460 of the IAC subsystem 33
Image 5.1 OBC prototype board 115
Image 5.2 COMMS power amplifier testing 115
Image 5.3 UPSat stack prototype boards 120
Image 5.4 The on-board ST-link connected to the stack 121
Image 5.5 J-links connected to UPSat for debugging 122
Image 5.6 UPSat systemview 125
Image 5.7 UPSat systemview testing 125
Image 5.8 UPSat systemview testing operation 129
Image 5.9 UPSat systemview operational plot 129
Image 5.10 UPSat extended WOD operational plot 129
Image 5.11 During S.U. E2E tests 130
Image 5.12 TVAC chamber with UPSat 132
Image 5.14 UPSat vibration test pod 132
Image 5.15 UPSat subsystem thermal inspection 132
Image 6.1 Some people of the team, the day before the delivery 136
Image 6.2 UPSat during the final tests before delivery 136
Image 6.3 UPSat in the Nanorack’s deployment pod. 137
Image 6.5 the CYGNUS supply ship that had UPSat, before docking to ISS 139
Image 6.6 UPSat along with 2 other CubeSats released from ISS 140
LIST OF TABLES
Table 1.1 QB50 related requirements. 26
Table 3.1 10 rules for developing safety critical code [39] 52
Table 3.2 17 steps to safer C code [40] 53
Table 3.4 ECSS services implemented by UPSat 63
Table 3.5 UPSat application ids 63
Table 3.6 Telecommand Data header 64
Table 3.7 Telemetry Data header 65
Table 3.8 Command and control packet frame 65
Table 3.9 Services implemented in each subsystem. 66
Table 3.10 Telecommand packet data ACK field settings 67
Table 3.11 Telecommand verification service subtypes 67
Table 3.12 Telecommand verification service acceptance report frame 67
Table 3.13 Telecommand verification service acceptance failure frame. 68
Table 3.14 Telecommand verification service error codes 68
Table 3.15 WOD packet format 69
Table 3.17 Housekeeping service structure IDs 71
Table 3.18 Housekeeping service request structure id frame 71
Table 3.19 Housekeeping service report structure id frame 71
Table 3.20 Function management service data frame 71
Table 3.21 Function management services in each subsystem 72
Table 3.22 Large data transfer service transfer data frame. 73
Table 3.23 Large data transfer service acknowledgement frame 73
Table 3.24 Large data transfer service repeat part frame 74
Table 3.25 Large data transfer service abort transfer frame 74
Table 3.26 On-board storage and retrieval service uplink subtype frame 75
Table 3.27 On-board storage and retrieval service downlink subtype frame 75
Table 3.28 On-board storage and retrieval service downlink content subtype frame 76
Table 3.29 On-board storage and retrieval service subtypes used on UPSat 76
Table 3.30 On-board storage and retrieval service delete subtype frame 76
Table 3.32 On-board storage and retrieval service catalogue list subtype frame 77
Table 3.33 On-board storage and retrieval service catalogue report subtype frame 77
Table 4.1 Number of packets and data payload sizes in each subsystem 81
Table 4.2 ECSS status codes 93
Table 4.3 Event service frame 99
Table 4.4 Large data transfer service, different states of the Large data state machine 105
Table 5.1 Functional test list and description 131
INTRODUCTION
The thesis is separated into 6 chapters that loosely correspond to the chronological time line of the events related to design and implementation.
In chapter 0 general information providing the context of the thesis will be presented.
In chapter 1 the research that was conducted in order to familiarize with the aspects of developing software for a CubeSat will be presented.
In chapter 2 the design choices that derived from the research of the previous chapter and the reasons behind them will be presented
In chapter 3 the actual implementation and the parts that diversify from the initial design and the causes of that will be discussed.
In chapter 4 the overall testing campaign and the techniques used will be presented.
In the final chapter, conclusions, thoughts and future improvements are presented and discussed.
Time
The most important factor in this project was time. From the first time, I heard of UPSat, to the day I was officially involved and the original date of delivery to the final delivery date of Aug. 18, only 6 months had passed.
Even though I consider my shelf to as an experienced in programmer and especially in embedded systems, writing fault tolerant software for a CubeSat was definitely new experience.
The time duration of 6 months was for: research, design, development and testing.
In this limited time frame, decisions had to be made in a instant, followed by the implementation.
Research time was reduced to minimum, design was given more time and testing was happening as the development progressed.
Due to these strict conditions, time limitations affected all aspects of the CubeSat development and it was the prominent factor in all decisions.
Space and software
Having to design and implement software that is indented to work in space, differs from other projects in 2 significant factors: Environmental radiation affects the electronics resulting in corrupt memory or more permanent damage like flash and the fact that once the CubeSat is launched into space, it cannot be examined or repaired.
CubeSats

Figure 1.1 CubeSat unit specification
CubeSats provide a low-cost access to space, it first started from California Polytechnic State University and Stanford developing the specification at 1999 with the first CubeSat launching at 2003. Most of the firsts CubeSats came from the academia but as soon as CubeSats proved their usefulness commercial companies started using it as well. Following the CubeSat as low-cost platform success are plans to send swarm of CubeSats to the moon or even mars, while all of CubeSats until now are confined to LEO.
CubeSats are ideal for experiments especially high risk that justify due to the low cost of a CubeSat. A good example of that is the QB50 experiment: The cost of fleet of 50 traditional satellites is not justified by the research conducted and other means like one satellite or a rocket doesn’t spend the time in the thermosphere the researchers wished [11].
CubeSats dimensions are defined in 1U that is equal to 10x10x10 cm and multiples of that. At first most of the CubeSats were 1U but later more options became available for launch configurations to 6U or even 12U.
Commercial Off The Shelf Components
One reason that makes CubeSats a low-cost solution is the use of COTS. The aerospace industry traditionally uses radiation hardened components that are especially designed to withstand the extreme conditions in space. These components are a lot more expensive from the commercial available counter parts and usually one generation behind in the technologies used.

 (a) Cubesat launches per year [13]. (b) CubeSat launches per organization [13].
Figure 1.2 CubeSat numbers
———————————————————————————— ————————————————————————————-
(a) Cubesat launches per year [13]. (b) CubeSat launches per organization [13].
Figure 1.2 CubeSat numbers
———————————————————————————— ————————————————————————————-
Space and open source
NASA states in [19]: “At the other end of the spectrum, low-cost easy-to-develop systems that take advantage of open source software and hardware are providing an easy entry into space systems development, especially for those who lack specific spacecraft expertise or for the hobbyist.”. This is also reflected in [53] as one of the best ways to improve is by reading other people’s code.
Sharing the same opinion, our experience, when we started working on UPSat, we couldn’t find any open source code available for examination. This made more difficult as there wasn’t a starting point in an already difficult project.
In my opinion, open source in space that fault tolerance is a must, it isn’t a luxury, but a critical necessity. By open sourcing and allowing a wider audience to view and analyze the code, not only help engage the community but also increases the possibility of discovering errors.
SatNOGS
The SatNOGS [4] project aim is to provide an open source software and hardware solution of a constellation of ground stations for continuous communication with satellites in LEO. Most of the parts are designed so they can be 3d printed in order to make a ground station construction more feasible. It is currently maintained from the Libre Space Foundation [3].
SatNOGS consists of 4 parts:
-
The Network is the web application used from the users for ground station operation.
-
The Database provides information about active satellites.
-
The Client is the software that runs on the ground stations.
-
The Ground Station contains the rotator, antennas and electronics.

Figure 1.3 SatNOGS [4]

Image 1.1 SatNOGS rotator [4]
Mission requirements
Figure 1.4 QB50 targets [8]
QB50 is a European FP7 project with worldwide participation from the von Karman Institute for Fluid Dynamics (VKI) in Brussels with the purpose to study the lower thermosphere, between 200 - 380km altitude using a network of 50 low cost cubesats.
QB50 provides 3 different types of Science Units and it’s up to the universities that participate to provide the cubesat to run the experiments.
The mission requirements derive first from the QB50 system requirements, the SU specifications and finally from subsystem requirements defined internally from the UPSat team. The mission requirements is the most prominent factor that shapes the software design. Some of the requirements are generic like the QB50-SYS-1.4.6 and the rest are related to specific parts of the UPSat. The QB50 requirements define operations regarding the WOD format and frequency, mass storage operations, time keeping format, clock accuracy and testing requirements.
Table 1.1 QB50 related requirements.
QB50 requirement number description ————————- ———————————————————————————————————————————————————————————————— QB50-SYS-1.4.1 The CubeSat shall collect whole orbit data and log telemetry every minute for the entire duration of the mission. QB50-SYS-1.4.2 The whole orbit data shall be stored in the OBC until they are successfully downlinked. QB50-SYS-1.4.3 Any computer clock used on the CubeSat and on the ground segment shall exclusively use Coordinated Universal Time (UTC) as time reference. QB50-SYS-1.4.4 The OBC shall have a real-time clock information with an accuracy of 500ms during science operation. Relative times should be counted / stored according to the epoch 01.01.2000 00:00:00 UTC. QB50-SYS-1.4.6 The OBSW shall protect itself against unintentional infinite loops, computational errors and possible lock ups. QB50-SYS-1.4.7 The check of incoming commands, data and messages, consistency checks and rejection of illegal input shall be implemented for the OBSW. QB50-SYS-1.4.8 The OBSW programmed and developed by the CubeSat teams shall only contain code that is intended for use on that CubeSat on ground and in orbit. QB50-SYS-1.4.9 Teams shall implement a command to be sent to the CubeSat which can delete any SU data held in Mass Memory originating prior to a DATE-TIME stamp given as a parameter of the command. QB50-SYS-1.5.11 The CubeSat shall transmit the current values of the WOD parameters and its unique satellite ID through a beacon at least once every 30 seconds or more often if the power budget permits. QB50-SYS-1.7.1 The CubeSat shall be designed to have an in-orbit lifetime of at least 6 months. QB50-SYS-3.1.1 The Cubesat functionalities shall be verified using the functional test sets. QB50-SYS-3.1.2 The satellite flight software shall be tested for at least 14h satellite continuous up-time under representative operations. QB50-SYS-3.2.1 CubeSats boarding the QB50 Sensors Unit shall perform an End-to- End test, to verify the functionality of the sensors and the interfaces with the CubeSat subsystems.
UPSat
In this section, the subsystems of UPSat are analyzed along with the respective hardware.
Most of the hardware was already designed from the university of Patras with the sole exception the separation of the OBC and the ADCS.
UART is used for subsystems communication except the IAC which uses SPI because the OBC didn’t had any UART peripheral left. All subsystems are connected to the OBC which is responsible for packet routing.
All subsystems implement at least the minimum ECSS services and provide the necessary services functionality.
The umbilical connector is used for charging the on-board batteries and serial connection with the OBC used for testing.

Figure 1.5 UPSat subsystems.

Figure 1.6 UPSat subsystems diagram


Image 1.2 UPSat subsystems mounted in the aluminum structure Image 1.3 UPSat’s umbilical connector and remove before flight switch
COMMS

Figure 1.7 COMMS subsystem [6]
The communications subsystem (COMMS) is responsible for the UPSat communication with the Earth and the ground stations.
It consists of: STM32F407 microcontroller with an ARM cortex M4 CPU core that has 1 Mbyte of Flash and
 192 Kbytes of SRAM, 2 CC1120 RF
transceivers with 2-FSK modulation, connected with the microcontroller
with SPI, one used for reception at 145 MHZ and the other for
transmission at 435 MHZ, the ADT7420 temperature sensor connected with
\(I\^2C\) and the RF5110g power amplifier used for amplifying the
transmitted signal.
192 Kbytes of SRAM, 2 CC1120 RF
transceivers with 2-FSK modulation, connected with the microcontroller
with SPI, one used for reception at 145 MHZ and the other for
transmission at 435 MHZ, the ADT7420 temperature sensor connected with
\(I\^2C\) and the RF5110g power amplifier used for amplifying the
transmitted signal.
The COMMS is connected to the antenna deployment system that deploys the 2 antennas after the launch from the ISS.
OBC

Image 1.5 OBC subsystem during testing
The On-Board Computer is responsible for routing the packets to the subsystems, operating the mass storage memory used for logs and configuration storage, managing housekeeping, maintaining UTC time and operating the SU via the SU scripts.
It consists of:
-
STM32F405 microcontroller with an ARM cortex M4 cpu core that has 1 Mbyte of Flash and 192 Kbytes of SRAM.
-
The microcontroller’s internal Real Time Clock connected with a coin cell battery.
-
An SD card connected with SDIO.
-
IS25LP128 128 MBIT Flash memory connected with SPI.
The initial design that was delivered from the university had the OBC and the ADCS in one PCB running all the functionality in one microcontroller. As at that time, it was unknown if the microcontroller could host both functionalities, it was decided to split the subsystems into 2 PCBs and microcontrollers respectively.


Image 1.6 OBC and ADCS subsystem Image 1.7 ADCS subsystem unpopulated PCB
ADCS
 The Altitude Determination and Control
Subsystem (ADCS) is responsible for determine UPSat’s position and
rotation and controlling the behaviour according to the defined set
points. The microcontoller takes the sensors information, feeds it to
the controllers, which provide the output of the actuators. The B-dot
controller is used during the detumbling phase (rotation greater than
0.3 deg/s) and after UPSat has stable rotation the pointing controller
takes control.
The Altitude Determination and Control
Subsystem (ADCS) is responsible for determine UPSat’s position and
rotation and controlling the behaviour according to the defined set
points. The microcontoller takes the sensors information, feeds it to
the controllers, which provide the output of the actuators. The B-dot
controller is used during the detumbling phase (rotation greater than
0.3 deg/s) and after UPSat has stable rotation the pointing controller
takes control.
It consists of:
-
STM32F405 microcontroller with an ARM cortex M4 CPU core that has 1 Mbyte of Flash and 192 Kbytes of SRAM.
-
IS25LP128 128 MBIT Flash memory connected with SPI.
-
An SD card connected with SPI.
-
GPS PQNAV-L1 connected with UART.
-
PNI RM3100 3 axis high precision magnetometer connected with SPI.
-
LSM9DS0 3 axis gyroscopes and magnetometers, connected with \(I\^2C\).
-
Newspace systems sun sensor.
-
AD7682 A/D converter for the sun sensor connected with SPI.
-
AD7420 temperature sensor connected with \(I\^2C\).
-
Spin-Torquer, a BLDC motor with a custom controller.
-
2 Magneto-Torquers embedded into the solar panels and a controller with PWM connection.
-
EPS
-

Image 1.9 EPS subsystems PCBs
The Electrical Power Subsystem (EPS) is responsible for charging the batteries from the solar panels, subsystems power management and batteries temperature control. It is also responsible for the post launch sequence that keeps the subsystems turned off for 30 minutes after the launch from the ISS and after the 30 minutes have passed, it deploys the antennas and the SU m-NLP probes by using a resistor to burn a thread that keeps the mechanism closed.
It consists of:
-
STM32L152 microcontroller with an ARM cortex M3 cpu core that runs the MPTT algorithm for charging the batteries.
-
3 Li-Po batteries.
-
MOSFET switches for controlling the subsystems power.


Image 1.10 The EPS PCB with the battery pack mounted Image 1.11 Solar panel used in UPSat along with a SU probe
Science Unit

Image 1.12 The science unit m-NLP
The science unit (SU) is the primary payload of UPSat. It is provided from the QB50 program and it’s the multi-Needle Langmuir Probe (m-NLP) type. It has 4 probes that are deployed after the UPSat launch from ISS.
SU communicates with the OBC through a serial connection. The OBC is responsible for sending commands to the SU and saving the SU information to the OBC’s mass storage.
IAC
The Image Acquisition Component (IAC) is the secondary payload of UPSat, defined from the university of Patras. It is comprised from the embedded linux board DART4460 running a custom OpenWRT build and the Ximea MU9PM-MH USB camera with a 50mm 1/2” IR MP lens.
The IAC’s DART and camera is connected to the OBC PCB and communicated directly to the OBC’s microcontroller through SPI.

Image 1.13 The DART4460 of the IAC subsystem
RESEARCH
In this chapter, the preliminary research for the software development of UPSat regarding the command & control module and the OBC is introduced.
Single event effects and rad hard
The most characteristic issue, during the design and operation of cubesats and satellites in general, is the harsh environment that they have to operate. The most prominent factor is the radiation. Radiation poses a threat to electronics, with observed malfunctions in missions [25] but with careful design shouldn’t be an issue.

Figure 2.1 Missions with radiation issues [25]
Radiation effects

Figure 2.2 SEE classification [49]
Radiation effects can be split in 2 categories:
-
Total Ionisation Dose.
-
Single Event Effects.
Total Ionisation Dose (TID) refers to the cumulative effects of radiation in space, resulting in gradual degradation in operational parameters in electronics [52]. This affects missions with longer duration than a typical CubeSat in LEO.
SEEs are separated into different groups and it can be transient or permanent:
-
Single Event Upset.
-
Single Event Latch-up.
-
Single Event Transients.
-
Single Event Functional Interrupt.
-
Single Event Burnout.
A SEU usually affects memory (SRAM, DRAM) and usual toggles a single bit or a larger area (more bits). SEUs are not destructive and usually dealt with a rewrite in the memory. The key issue is it need to be detected it before it leads to failure [49].
A SEL and a SEB could lead to permanent damage to part if the current is not limited quick enough [52], SEL is usually dealt with protection circuits [52] when possible. Sometimes a bit could be stuck in a specific state. This could lead to failure if the bit is changed in sensitive areas. Latch-ups though are not common events in CubeSats and it usually affects mission with longer duration [25]
A SET can affect logic gates and can also appear in analog to digital converters. SET are usually harmless
A SEE could lead to a SEFI, if the SEE affects a microcontroller or an equivalent device and put it to an unrecoverable mode [52. By res but it could have devastating results e.g. if the SEE affects the flash memory that stores the program of the OBC resulting in a bricked device.
Protection from radiation effects
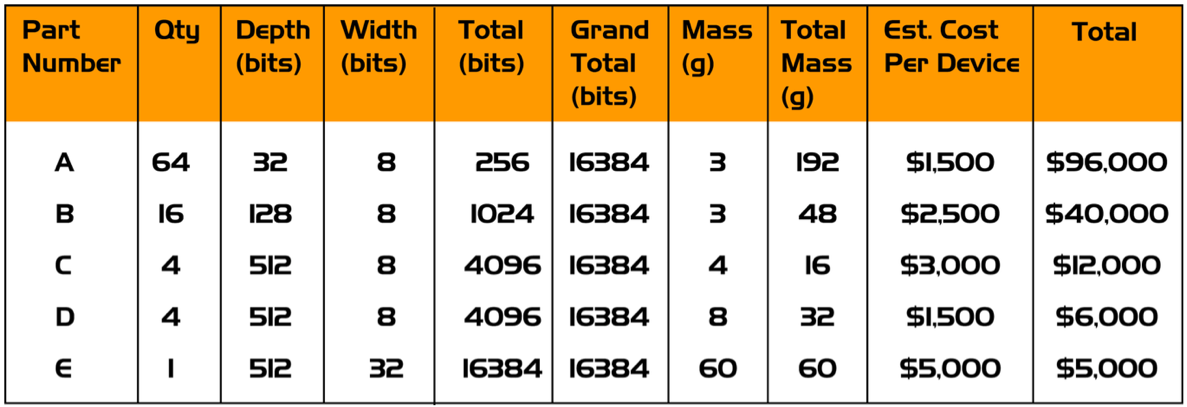
Figure 2.3 Cost of 2Mbytes rad-hard SRAM [30]
Some traditional ways to protect a satellite from radiation is:
-
Shielding.
-
Radiation hardened processors.
-
EDAC memories.
Shielding is not the best way for a CubeSat, since it adds weight and it doesn’t fully protect from SEEs [49]. In [42] the mechanical structure can be used to shield sensitive components by placing them in less affected areas.
Rad-hard processors are typical most costly, have less performance, the components available are limited, more power consumption and are at least a generation older than COTS processors [30].
EDAC memory which is ram with error correction in the hardware are also costly.
Moreover, even if rad-hard CPUs offer protection from SEUs, they are not totally immune to SEUs [43].
Due to the cost and the disadvantages stated above, associated with rad-hard components, there is a trend moving from rad-hard to COTS and from hardware protection to software [49] [30] [50] [56]. Reliability issues can be improved by using fault tolerant techniques and redundancy [50].
As already proven by PhoneSat [22] and SwissCube [45], rad-hard components, EDAC memories and other techniques for SEE mitigation, are not necessary for a CubeSat to work.


Figure 2.4 Argos testbed rad-hard board SEU [43 Figure 2.5 Argos testbed COTS board SEU [43]
State of the art
Almost the first thing that was researched, in order to draw inspiration, was other CubeSats. The most heavily influences were: the first swiss CubeSat [45] and ZA-Aerosat of the ESL Stellenbosch university [36]. Due to the time restrictions of project, the time allotted in the research was minimal.
NASA state of the art
In “small spacecraft technology state of the art” [19]. from power, communication to integration, launch and deployment, NASA lists all of the state of the art technologies needed in a CubeSat. As software isn’t mature enough and lacks behind hardware as stated, it doesn’t provide much info in software frameworks etc.
ZA-Aerosat
In Heunis [36], It describes the design and implementation of a QB-50 CubeSat named ZA-Aerosat. Since it is a master thesis, it provides a lot of information about the design that is found in papers.
In the early phase of the project it provided valuable information about SEE’s, fault tolerance and modular programming. Moreover, it gave high level overview of the software about the ECSS and services, memory management and fault tolerance implementation.
SwissCube
This is a great paper [45], even though it doesn’t use up to date technology, it gives valuable lessons, not only in the design but also in factors that are usually underestimated like the management of people and communication.
One interesting design feature is that the Swiss cube has a very simple CW RF beacon that is almost independent from the rest of the design. That is an excellent fault tolerant design
The Swiss cube team scheduled end of phase reviews, with reviewers from the space industry. That allowed them to have good advices that made them reconsider some parts of the design.
Swiss cube software is analyzed in Flight software architecture [24].
SwissCube uses a distributed architecture, this gives the advantage of isolated design, implementation, testing and allows each team to work independently.
For command and control SwissCube uses the ECSS-E-70-41 [54]. It uses the telecommand verification, housekeeping, function management and a custom service used for payload management.
Finally, the suggestion that has the most impact was that we should aim for design simplicity. In my personal I couldn’t agree more with that advice.
A summary of interesting point is listed below:
-
The EPS is designed to operate without a microcontroller, also it can lose one battery without failing.
-
During the environmental tests, they did radiation tests, which provided interesting information.
-
Swiss cube uses radiations Shields.
-
Implement and test the communication bus as it has critical implications in the whole design.
-
Plan big flight software tests.
-
Implement the ground station software early as possible for testing.
-
Add remote software updates.

Figure 2.6 SwissCube exploded view [45]
Phonesat

Image 2.1 PhoneSat v1.0
PhoneSat [22] is a CubeSat and as the name suggests, is based on an android phone.
Even though we can’t borrow software and hardware ideas due to completely different design and mission goals, it’s main mission objective apply directly to UPSat.
The PhoneSat project long term goal as stated in [22] is to “democratize space by making accessible to more people”, also it states that “The PhoneSat approach to lowering the cost of access to space consist of using off–the-shelf consumer technology, building and testing a spacecraft in a rapid way and validating the design mainly through testing”.
Derived from the successful mission results, it proves that a CubeSat doesn’t need complicated fault tolerant techniques or special hardware, in order to work.
The PhoneSat project consists of 2 versions, both of the versions have a Nexus smart phone, as the main computer.
PhoneSat v1.0 is a very simple design, with the mission goal to prove that such a design is feasible. It has a nexus smart phone, Lion batteries that weren’t rechargeable from solar panels, an external beacon radio and an Arduino that is used as a watchdog timer, resetting the smart phone in a case something went wrong. Also, the smart phones camera was used to take photos of the earth.
PhoneSat v2.0 is building up on the first design by adding solar panels and rechargeable batteries, an ADCS and 2-way communication module (earth to PhoneSat) along with the first version beacon. It also uses more Arduinos to handle the extra tasks. This design is more similar to mainstream CubeSat.
The main software runs on android and in Java programming language. For that reason, it has little value to the UPSat design.
2 PhoneSats v1.0 and 1 v2.0 were launched in 2013, all PhoneSats were operational and operated as expected.


Image 2.2 PhoneSat v2.5 Figure 2.7 PhoneSat 2.0 data distribution architecture
CKUTEX
The software development for CKUTEX [55] didn’t provide value for our design probably because the design is different from UPSat. It uses CAN bus for communication.
i-INSPIRE II


Figure 2.8 i-INSPIRE II CubeSat [47] Figure 2.9 i-INSPIRE II software state machine [47]
The CubeSat design overview report of the i-INSPIRE II CubeSat [47] which is part of the QB50 program, was found online. The report doesn’t offer too much information for the software implementation but offer some information about the hardware used.
INSPIRE uses a msp430 for primary OBC and a spartan 6 FPGA for secondary processor and experimentation. It has I^2^C buses for sensor and command and control. An interesting fact is that the main processor board is a CTOS provided from Olimex and is not designed in house. The OBC and the ground station communicate with an ASCII protocol.
Command and control module
The CnC (command and control) module, defines the protocol for earth to satellite (and vice versa) communication and inter subsystem communication. It consists of the packet format, header and data definition. Operations are grouped into services, defined by the protocol.
There were two choices concerning the CnC protocol: design a custom protocol or adopt an existing.
There were 2 protocols found ECSS and CSP, I couldn’t find any other. Even if there are other protocols used in CubeSats, for example in PhoneSat [22] but the specification is either not published as a specification or there are highly specific for that mission.
A custom protocol could have been developed but due to time restrictions, also due to the availability and quality of CSP and ECSS, it was decided not to reinvent the wheel.
Requirements
The following requirements were set in order to evaluate CSP and ECSS:
-
Low protocol overhead.
-
Lightweight.
-
Highly modular and customized.
Since all interactions to subsystems and earth uses the protocol, if the protocol overhead isn’t efficient, it leads to power waste and added data traffic.
The CnC module will be used with microcontrollers that have limited processing power and resources, so it need to be lightweight.
The protocol should be designed in way that allows some degree of customization, so the implementation will be tailored on the resources available and be efficient.
CSP

Figure 2.10 CSP header
CSP was developed by students in Aalborg University and is currently maintained by the students and the spin-off company GomSpace [35].
CSP at first stood for CAN Space Protocol since it used CAN bus but later as implementations for other buses were developed, it changed to CubeSat Space Protocol.
It is something like a lightweight IP. The header size is 32 bits which is small without sacrificing functionality. The data in the header is not framed in 8 bit which could lead in performance issues in 8 bit microcontrollers. CSP has a nice feature that ECSS lacks, configuration bits that allow to change the frame configuration at run time.
CSP has open source code available with the code ported to FreeRTOS.
In the Wikipedia entry, it says that specific ports are bound to services such as ping but the description of the services couldn’t be found.
CSP uses RPD or UDP depending on the user needs, guarantying reliability or not.
ECSS

Figure 2.11 ECSS TC frame header

Figure 2.12 ECSS TC data header
The ECSS-E-70-41A specification is a work of European Cooperation for Space Standardization and is based in previous experiences. For simplicity ECSS-E-70-41A would be refereed as ECSS in this document.
ECSS is a well-defined protocol and the specification is clear and well written. ECSS describes the frame header and a set of services. The header has a lot of optional parameters that makes it easily adapted to the application needs. The services listed are all optional and it’s up to the user to implement them. Moreover, each service has a list of standard and additional features depending again to the application needs.
The header has 2 parts: a) the packet header, which is standard, and is 6 bytes. b) the data field header, which is variable due to different options available. The options are: packet error control (Checksum [27]), timestamp, destination id and spare bits (so the that the frame is in octet intervals).
Depending on the application and the number of distinct application ids, the user can select to have only 1 set of application ids, defining both the source and destination in one byte, If the number of application ids is large than a separate source/destination has to be used.
The header implemented was 12 bytes versus the 4 bytes of CSP. The switch between TC/TM and source/destination can be confusing. One feature that the protocol lacks is that it doesn’t have a mechanism for different configurations on runtime like the configuration bits of CSP, having configuration bits denoting different configurations, such as the existence of a timestamp or a checksum in the packet, would have made the protocol a lot more versatile.
ECSS is packet oriented e.g. mass storage service use of store packets, even though it’s not a huge disadvantage, it can a bit tedious and could lead to inefficiency on the implementation.
In my personal opinion, it was a delight working with such clear and well-defined document. While reading the specification, I could sense the accumulated experienced from previous designs. Also, the specification was more like targeted in microprocessors with more resources than a microcontroller, for example, an indication is the large data service: the implementation in order to be efficient and uncoupled from other modules needs the whole large data packet stored in RAM. In order to work efficient, the large data packet need to be several times larger than a usual packet, this could be an issue with resources available in microcontrollers but usually not an issue in microprocessors that have large amount of memory.
Comparison
In this subsection, a comparison between CSP and ECSS is performed:
ECSS is more versatile, in the other hand the CSP advantage is its simplicity.
The data overhead is larger in ECSS but the implementation of the same functionality in CSP could lead to similar sizes or even larger.
One important issue is that, the time the research took place, the formal specifications couldn’t be found online.
-
CSP and ECSS have a similar source, destination port and application id.
-
Both of them are in binary format.
-
~12 bytes (ECSS) versus 4 bytes (CSP).
-
ECSS doesn’t have a reliability mechanism for delivering packets.
-
32 bits (CSP) versus 8 bits (ECSS) oriented.
-
Dynamic configuration on runtime (CSP) versus variable options but static on runtime (ECSS).
-
Open source code available (CSP).
-
Result
-
For the following reasons, it was decided to use the ECSS protocol. It was an easy decision, primarily for the CSP lack of formal specification and the modular design of the ECSS.
-
ECSS was recommend by QB50.
-
ECSS is used by many other cubesats.
-
The formal CSP specifications was not found.
-
ECSS is based on experience on previous protocol designs, as a result the protocol is highly refined.
-
ECSS is highly flexible on the actual implementation and it allowed to customize it according to our needs.
-
Safety critical software
-
C is the language of choice for UPSat. ADA was never really embraced from the community, Rust is too young and both of them lack the ecosystem to quickly use them with the STM32 microcontroller. C though was primary designed for system programming and not for safe critical code, leading to a lot of different issues when used in that field. Developers confusion about the C language use, along with the growing complexity of the design [34] [38] the state of uncertainty [21]. In addition, as compilers is software itself, any bugs they have may introduce bugs to the application. In order to achieve a good level of safety, different techniques have been developed, such as the use of coding standards, software that checks the use of the coding standard and static analyzers that check the code for bugs [38] [21].
Undefined behavior
C by design has a lot of undefined behaviors. This happens because c is primary designed for systems programming and it uses undefined behaviors as a way for compilers to be optimized for specific hardware. A great example is in [63] with the case of division by zero and how different architectures handles them.
Unexpected behavior in C could lead to bugs especially as most engineers aren’t aware of them (I was one of them) [64]. One interesting website [2] that questions your knowledge of C and uncovers misinformation.
From it can be seen that different compilers produce different code. This was Also it complicates testing. Even different versions of the same compiler may introduce bugs [64].
As it can been seen from a lot of failures are introduced from compiler optimizations [63] [64]. For that reason, all of the development went with optimizations disabled.
Coding standards
With the use of coding standard in the project, we try to improve code clarity [37] and prevent bugs, which are introduced by not fully understand or misuse C.
The most widely known coding standard is the misra-c [18] which is developed from MISRA. The standard was introduced in order to improve code safety and security. The next is the standard [23] developed by Michael Barr a known expert in code safety. Another 2 was found, designed from ESA [31] and NASA [46].
The main problem with the above coding standards was that they have many rules which that makes it difficult for a human to remember and use. Usually software that check for the rules and enforce them is used [38]. For the above reasons Gerard J. Holzmann at JPL introduced the power of 10 rules [39]. By having only 10 simple rules Holzmann managed to improve the usage of a coding standard by a developer. The rules are simple, specific, easy to understand and easily remembered. At first the rules seem to be draconian but as soon as someone gets a better understanding, can see the benefits in code clarity and safety [39]. After the introduction of the 10 rules the JPL coding standard [17] was created. The coding standard uses the 10 rules and most of the times add more specific rules [44]. In addition to the JPL’s 10 rules, the 17 steps [40] were consider as well.
Fault tolerance
Fault tolerance is “Fault tolerance is the property that enables a system to continue operating properly in the event of the failure of (or one or more faults within) some of its components” [59], in our case the ability of the UPSat to tolerate errors or failures, generated by either bugs in the design, implementation or radiation inducted, without leading to catastrophic events. Fault tolerance design is mostly based in adding redundancy in software, hardware or both.
Careful fault tolerant design allows to use COTS components that gives great advantages in reducing cost and achieving better performance [29].
There are 2 separate planes in which fault tolerant techniques can be applied, hardware and software, with a clear trend to migrate to ta later [56], for cost reducing reasons of course. Having a historical look, we can see that trend in NASA’s missions [29].
Unfortunately, the time available and the already designed hardware didn’t allowed to add fault tolerance in the hardware in the form of redundant hardware and voting mechanisms. Most of the fault tolerant designs had to be Incorporated in the software.
Fault tolerant mechanisms
There are up to 8 different types of error recovery mechanisms, below the 4 most important are listed [26] [29].
-
Fault masking.
-
Fault detection.
-
Recovery.
-
Reconfiguration.
Fault containment is the most important mechanism, since it contains the error before leading to permanent damage.
Fault detection is the ability of the systems to understand that error has occurred. Even if fault masking manages to contain the issue, fault detection is crucial in order to evaluate the systems behavior. Diagnosis happens if with fault detection, the nature of the failure is not clear enough.
Recovery makes the system recover from and error and behave as normal.
Reconfiguration as the name states is the process of reconfiguring in the event of permanent damage.
Fault containment and recovery are the most important mechanism in systems, since it allows the system to continue working in the event of error. Fault detection and diagnosis allows the ground crew to identify the issue and maybe give correctional procedures and afterwards the study of the failure information will lead in to better future missions. Reconfiguration is limited used in UPSat, mostly because the hardware design doesn’t allow it.
Built in tests
Build in tests are usually automatic tests B.I.T. that run and help to determine if the state of the system is correct, they can run on startup
- power on BIT or when the system is idle - continuous BIT [26]. FPGAs have the advantage that they can run BIT on circuit level BIT referred as BIST. For an example, a BIST can feed components with patterns that are pre-calculated and check if the output is the same as the one expected.
Single point of failure
The single point of failure is a very important concept in fault tolerance: it denotes a part in the system that if that part fails, the whole system fails. As one can imagine it is highly undesirable in safety-critical systems and great measures has to be taken in order to avoid such parts in the design.
For example, in SwissCube [45] a single point of failure is a RF switch that alternates the RF modules responsible for communication and the RF beacon.

Figure 2.13 Fault tolerance mechanisms [29]
State of the art fault tolerance
Most of the state of the art systems for fault tolerance, incorporate FPGAs in their designs. FPGA have the advantage that they can reconfigure so a damaged area in the IC due to SEEs can be avoided.
JPL used radiation-tolerant FPGAs in the Mars exploration mission [51].
ZA-Aerosat [36] uses a hybrid FPGA - microcontroller approach, where the FPGA acts in an intermediate layer between the microcontroller and the memory. The FPGA houses custom logic that with the memory, emulates an EDAC memory.
CNES MYRIADE uses a FPGA for safe against SEEs issues storage [50].
ISAS-JAXA REIMEI uses a FPGA as voting mechanism [50].
Fault tolerance in hardware
Hardware fault tolerance is induced by adding redundant hardware and usually having hardware acting as a voter deciding which of the redundant hardware is correct. The configuration of the redundant hardware and voter design is correlated to the application and the budget.

Figure 2.14 Hardware fault tolerance [26]
A voter which is a hardware specifically added for fault tolerance. It doesn’t mean that is immune to errors and extra caution should be taken in the design. A voter adds to the complexity of the design and it can even lead to the liability of the design. An example is the airplane of the Malaysia Airlines Flight 124 where the ADIRU due to a software error, used a faulted sensor for flight data, leading to a serious incident [58].

Figure 2.15 B777 flight computer [57]
Two interesting designs are Boeing’s 777 flight computer and the AIRBUS A320-40 flight computer [57]. The B777 has a “triple-triple configuration of three identical channels, each composed of three redundant computation lanes. Each channel transmits on a preassigned data bus and receives on all the busses” [57]. AIRBUS’s flight computer has the same specification as the B777 but follows a different approach, a shadow-master technique, where the boards and software is designed by different manufactures.

Figure 2.16 AIRBUS A320-40 flight computer [57]
Fault tolerance in software
The first basic technique is called partitioning. By writing modular software with clear boundaries, partitions: areas that contained are created.
Adding recovery on partitioning with the use of Checkpoints [48] [57] add recovery to the partitioning technique, by adding points in modular software, where the state can be saved and revert back in the case of an error and resume from that point.
By integrating the fault tolerant techniques in a framework, the software development and the fault tolerance can be uncoupled, thus reducing the complexity of the software. That allows the developer to focus on the implementation of the software and not in fault tolerance [57].
Dynamic assertions is an interesting technique used for runtime evaluation of objects [48]. Even though the concept described is for object oriented languages doesn’t mean that we can’t use some aspects of the concept.
A very common approach to software fault tolerance is the technique of multi-version software. Two software teams develop the same application with different approach, sometimes with different tools or restrictions and both of the software runs on different processors in voting scheme [57]. This approach shows no great advantages and it is not cost effective. A better approach uses the same software and the difference is that is compiled from different compilers [57]
Finally testing the software with Software Fault Injection can lead to bugs discovery, when with traditional testing techniques would be very difficult to find [57].
DESIGN
In this chapter, the various design choices and the reasons behind are discussed.
Coding standards on UPSat
There wasn’t enough time to setup the tools needed to enforce and use properly a specific coding standard, for that reason the JPL’s 10 rules [39] and the 17 steps to safer C code [40] were primary used as guidelines.
10 rules
Rules 1, 2, 3, 5, 8, 9 were followed religiously and in no accounts, there were allowed not to be followed.
Rule 4: 60 lines of code per function wasn’t strictly followed as some flexibility was needed but in any case, it wasn’t allowed to
Rule 5: The suggestion was to cover as more cases of assertion as possible, especially to the beginning of a function but without having a minimum.
Rule 6: The rule was followed in general except when code clarity was an issue the rule was allowed to be broken.
Rule 10: Couldn’t be used since the code generated from cubeMX broke the rule.
Finally, the rules weren’t enforced automatically as there wasn’t time to setup a tool to check them and it was left to the developer’s good will to use them.
17 steps
The 17 steps to safer C code provide some very good guidelines, with some complimentary to the 10 rules even if most of them they seem like common sense to an experienced programmer.
The most important step was step 2. Using enumerations not only as error types but as state variables and always defining the last enumerations allowed to make easy range checks with assertions.
Step 15 might seem obvious to most programmers but in my opinion, is the essence of safety-critical code, simplicity improves clarity and clear code is easier understood and
Steps 1, 3, 5 suggests something that is a basic concept for programming but sometimes when working too much hours can be forgotten
Steps 4, 6, 11, 12, 14 are critical for a correct software design and lies within the idea of modular and fault tolerant software.
Step 8 wasn’t applicable to our project since the requirements were already defined. Also steps 9, 10 due to the nature of the project.
Step 13 is about the volatile keyword in C that it is rarely used in non-embedded projects. The concept of volatile can be quite critical in embedded and the incorrect or no usage can lead to very subtle and difficult bugs.
As seen in chapter 1, static code analyzing described in step 16 is an absolutely must.
Using the right tools can save a lot of trouble and time (step 7).
Fault tolerance on UPSat
The main techniques used for fault tolerance in software was:
-
Error detection.
-
Error containment.
Due to mission timing constraints, implementing fault tolerance on hardware and other techniques was impossible.
Software was designed as modular and uncoupled as possible, in order to ac hive error containment. Further techniques that was used were:
-
Assertions.
-
Watchdog.
-
Heartbeat.
-
Multiple variables.
-
Assertions
-
The first line of defense was the use of assertions. Assertions check in real time for null pointers, correct range of parameters and correct parameters. If the assertion catches an error, most of the times it cancels the operation and returns to normal state. In order for assertions to be effective, they need to be used regularly.
Watchdog
The next technique is the watchdog timer. Watchdog timers are a very common peripheral in microcontrollers and a widely used technique against software bugs. The watchdog resets the microcontroller if the timer it shelf is not reset in a specific time interval. This way if a task has entered a blocked state due to an error, the microcontroller resets and returns to its starting state.
There are two techniques that the watchdog is used: The OBC and the EPS, clear the timer only if certain tasks have happened. In particular for the OBC it is required that all tasks had run at least once. Every time a task runs, it clears a flag, if all flags have been cleared then the timer gets cleared. In addition to that, ADCS and COMMS check for errors in sensor reading and RF communications, accordingly. The same technique could have been used in the OBC but time constraints didn’t allow for proper design and test.
Table 3.1 10 rules for developing safety critical code [39]
Rule Num Description ———- ———————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————– 1 Restrict all code to very simple control flow constructs - do not use goto statements, setjmp or longjmp constructs, and direct or indirect recursion. 2 All loops must have a fixed upper-bound. It must be trivially possible for a checking tool to prove statically that a preset upper-bound on the number of iterations of a loop cannot be exceeded. If the loop-bound cannot be proven statically, the rule is considered violated. 3 Do not use dynamic memory allocation after initialization. 4 No function should be longer than what can be printed on a single sheet of paper in a standard reference format with one line per statement and one line per declaration. Typically, this means no more than about 60 lines of code per function. 5 The assertion density of the code should average to a minimum of two assertions per function. Assertions are used to check for anomalous conditions that should never happen in real-life executions. Assertions must always be side-effect free and should be defined as Boolean tests. When an assertion fails, an explicit recovery action must be taken, e.g., by returning an error condition to the caller of the function that executes the failing assertion. Any assertion for which a static checking tool can prove that it can never fail or never hold violates this rule. 6 Data objects must be declared at the smallest possible level of scope. 7 The return value of non-void functions must be checked by each calling function, and the validity of parameters must be checked inside each function. 8 The use of the preprocessor must be limited to the inclusion of header files and simple macro definitions. Token pasting, variable argument lists (ellipses), and recursive macro calls are not allowed. All macros must expand into complete syntactic units. The use of conditional compilation directives is often also dubious, but cannot always be avoided. This means that there should rarely be justification for more than one or two conditional compilation directives even in large software development efforts, beyond the standard boilerplate that avoids multiple inclusion of the same header file. Each such use should be flagged by a tool-based checker and justified in the code. 9 The use of pointers should be restricted. Specifically, no more than one level of dereferencing is allowed. Pointer dereference operations may not be hidden in macro definitions or inside typedef declarations. Function pointers are not permitted. 10 All code must be compiled, from the first day of development, with all compiler warnings enabled at the compiler’s most pedantic setting. All code must compile with these setting without any warnings. All code must be checked daily with at least one, but preferably more than one, state-of-the-art static source code analyzer and should pass the analyses with zero warnings.
Table 3.2 17 steps to safer C code [40]
Step Description —— ————————————————- 1 Follow the rules you’ve read a hundred times 2 Use enumerations as error types 3 Expect to fail 4 Check input values: never trust a stranger 5 Write once, read many times 6 When in doubt, leave it out 7 Use the right tools 8 Define the software requirements first 9 During boot phase, dump all available versions 10 Use a software version string for every release 11 Design for reuse: use standards 12 Expose only what is needed 13 Make sure you’ve used “volatile” correctly 14 Don’t start with optimization as the goal 15 Don’t write complex code 16 Use a static code checker 17 Myths and sagas
Heartbeat
The last check is the subsystem health check performed by the EPS or heartbeat as we call it. EPS was chosen for this role because it handles the subsystem power.
Each subsystem sends a heartbeat packet (ECSS test service) to the EPS every 2 minutes. When the packet is received from the EPS, it updates a timestamp variable. If that timestamp minus the current time is longer than 20 minutes then the subsystem is reset. It doesn’t have to be a heartbeat packet by any packet will update the timestamp. The heartbeat is used because in normal circumstances, the ADCS and COMMS don’t communicate with the EPS.
Since the OBC does the packet routing, if the OBC fails, the heartbeat packets from ADCS and COMMS destined to EPS won’t be delivered. For that reason, the EPS checks if the OBC has an updated timestamp and then checks for the other subsystems. OBC and EPS have communication every 30 seconds for housekeeping needs, so it should be clear if the OBC works. Otherwise the OBC is reset and all subsystems timestamps are updated (ADCS, COMMS, OBC). This happens so the other subsystems are not reset in case of an error of the OBC.
The heartbeat is intended as the last in line of error checking techniques, the choice of 2 minutes for refresh and 20 minutes for reset reflect this. Having a 2 minutes refresh interval in a 20 minutes window has very good possibilities to be received from the EPS, without generating too much traffic. The 20-minute window is used, in case there an error in the heartbeat mechanism or the OBC routing and the subsystem operate correct, the 20 minutes give enough time to subsystems to perform adequate.
Multiple checks
The EPS and COMMS store in multiple locations the critical data. The data hold critical states of the CubeSat. The state values are generated with random number generator. More over the states have multiple values. These are used for protection against SEEs.
OBC
In the following sections the design choices about the OBC will be analyzed.
OBC-ADCS schism
The hardware design that was initially designed delivered, had the OBC and ADCS on the same PCB and microcontroller. There were concerns if the same microcontroller could handle both of the software, in terms of processing power and the added complexity of the software design. For that reason, it was decided to split the OBC and ADCS to different into 2 separate subsystems. The disadvantages of that design were: increased power consumption and crucial man hours spend into partial redesigning the PCBs.
Without having a good understanding of the processing requirements and the processing power of the microcontroller, having a bottleneck at a later phase of the project, which changes would had been more difficult to make or even impossible. Having both subsystems into one hardware seemed a far greater risk than spending the resources to split and redesign the hardware.
In practice, the OBC uses almost no processing power and the ADCS use only the processor periodically, meaning that that the processing needs of the subsystems could fit into one microcontroller. The decision to separate the subsystems, as it seems wrong at first, it allowed to uncouple the software development and testing, saving precious time during the integration and testing phase of the project.
OBC real time constraints
In UPSat there are certain operations that are critical and they should happen in strict timeframes. For that reason, the real-time requirements in such critical tasks were defined.
Real time constraints are grouped into 3 general categories [62]:
-
Hard – “missing a deadline is a total system failure”.
-
Firm – “infrequent deadline misses are tolerable, but may degrade the system’s quality of service. The usefulness of a result is zero after its deadline”.
-
Soft – “the usefulness of a result degrades after its deadline, thereby degrading the system’s quality of service”.
The real time constrains in OBC and command and control derived from analyzing specifications, the overall design and finally from past experience with embedded devices.
The first priority and hard real-time constraint, is to process an incoming packet before the next one comes so there aren’t lost packets. This especially critical for the OBC since it does all the packet routing.
At 9600 baud rate, with minimum 12 bytes per packet, plus minimum 2 bytes for HLDLC framing. In the worst-case scenario, a packet needs to be processed in 14.5msec. The OBC is connected to 3 subsystems so it can take 3 packets simultaneously, leading to 14.5/3 = 4.8msec.
The next hard real-time constraint is to send Housekeeping packets every 30 seconds with 500 msec accuracy. This is a huge time frame for an embedded system, so normally it wouldn’t be a problem.
The SU script engine had to be able to run within 1 second of the scripts run time.
The schedule service had to release TC within 1 second of the commands release time.
Finally, all OBC’s tasks must run at least once within 30 seconds time frame.
-
Packets processing, hard real-time constraint.
-
Housekeeping, hard real-time constraint.
-
SU engine, hard real-time constraint.
-
Scheduling service, hard real-time constraint.
-
OBC tasks, hard real-time constraint.
-
RTOS Vs baremetal and FreeRTOS
-
For the OBC there are 2 choices regarding the software, either run bare metal on the microcontroller and design a custom scheduler from scratch or use a RTOS.
A bare metal solution offers to make unique customized and optimized code that the developer team understand (as they wrote it), but has the disadvantages of limited review, it carries a greater risk in case of a design flaw and finally another key part of the software has to be designed and implemented.
The RTOS has code that is already tested and proven working on applications but it won’t be bug free. Working with a RTOS would require evaluation of different RTOSes in order to choose the most suitable and afterwards careful examination of the RTOS in order to understand key concepts for the working and for future debugging.
The choice of a RTOS instead of bare metal was obvious, due to the nature of the tasks of the OBC: different tasks with different timings and a mix of synchronous and asynchronous events in comparison of e.g. the ADCS which has synchronous linear tasks that would be easier and simpler to implement when used a RTOS.
-
RTOS suits better the OBC tasks.
-
RTOS is well tested and used.
-
Time needed to study the RTOS is far less than developing the scheduler.
-
Need extra time to familiarize with the RTOS concepts.
There are numerous candidates for a RTOS such as FreeRTOS, embOS [12], vxworks [9], RIOT [16] and mC/OS [7] but none of them except FreeRTOS, had met the requirements of the project. FreeRTOS is very simple with only 3 files with basic functionality, has been already ported by ST, it is open source and has already been used in many projects plus it is supported from all major companies.
-
Simple.
-
Minimum time for integration.
-
Open source.
-
Mature.
-
FreeRTOS concepts
-
As the choice for the OBC’s RTOS, FreeRTOS concepts and design needed to be studied. Besides the primary reason which was to identify if FreeRTOS was suited for the OBC, a better understanding would lead to following:
-
Optimized design and implementation.
-
Having a better understanding of the FreeRTOS limitations.
-
Detecting design intricacies that might lead to bugs.
-
Solving bugs.
The basic concepts were described in FreeRTOS documentation. Finally [41] and a combination of source code examination, step by step debugging, and systemview was used to get an in depth understanding of FreeRTOS. Finding information besides the basic concepts was extremely difficult.
Introduction to FreeRTOS
FreeRTOS was by Richard Barry in 2003 and it has become an industry de facto standard RTOS for microcontrollers. It is open source and the licensing allows proprietary applications to not reveal the source code.
FreeRTOS has been ported in over than 35 microcontrollers and has partners all the major microcontroller companies.
FreeRTOS has been already used in many CubeSat missions [36] [41] and is available in most COTS vendors for use in their boards [35].
FreeRTOS is very simple, it basically is a priority scheduler for threads, called tasks in FreeRTOS terminology, along with supporting mechanisms such as mutex, semaphores queues etc.
Tasks
Threads are called tasks in FreeRTOS terminology. Tasks are created by using the taskCreate function. Also, tasks can be deleted but it’s not used in the project. A task has 4 different states:
-
Ready.
-
Running.
-
Suspended.
-
Blocked.
Tasks that are in the ready list are waiting to execute, in the running state are the current task working and in the blocked state when a task wait for a resource to become available or the delay time to be completed.
Each task has a priority, that is defined at the task’s creation. A task that has the lowest priority called idle and must always exist in a FreeRTOS project.
FreeRTOS has a support for semaphores and mutexes. In addition, there are queues that are used for thread safe intertask communication.
The scheduler checks in every tick if a task of a higher priority is ready to run and makes the context switch accordingly. If the task has the same priority the tasks share running time round robin.
The scheduler runs in an ISR every tick of the RTOS timer. Usually in ARM cortex M cores the timer used is the systick. The timer’s resolution defines the quantum of (minimum) running time of a task. The timer’s resolution and configuration affects the max delay possible from the freeRTOS delay function.
If a FreeRTOS API function needs to be used from an ISR has different set of functions specific for ISR use, usually the function has the ISR added in the function name.
Critical sections
If an action needs to finish without an interruption there are 2 mechanisms that can be used. The first option is to disable all interrupts and thus disable the scheduler but has the major drawback that it also disables interrupts that are created from peripherals. The second option is to disable the scheduler and thus remove the chance of a possible context switch.


Figure 3.1 Tasks [12] Figure 3.2 tasks life cycle [12]
Stack overflow detection
FreeRTOS has 2 methods for detecting stack overflows. In the first method, the bottom of stack has been filled with known values and in every context, switch those values are checked if there are overwritten. The second method checks in every context switch if the stack pointer remains in valid values.
Heap modes
FreeRTOS has 5 models for the heap memory management that allows different levels of memory allocation with heap 1 that doesn’t allow any memory to be freed after they were allocated and to heap 5 that the maximum freedom. Since memory allocation after the initialization is prohibited in JPL’s 10 rules the only suitable model for UPSat is heap 1.
Advanced concepts
A task’s information used from the FreeRTOS are stored in a Task Control Block (TCB) structure. For every state of a task FreeRTOS has lists that store each task that is in that state. Every time a task changes state it is added to the corresponding list. The scheduler in every tick, checks the ready list for a task waiting to run and compares the priorities with the currently running.
In each context switch the scheduler stores the registers value and the stack pointer which is also a register and loads the registers of the task that is about to run. This code is specific to the architecture and usually is implemented in assembly.
Logging and file system
One of the basic functions of the OBC was to uplink and use SU scripts, store various logs (WOD etc.) and download them into the ground station. A SD card connected to the microcontrollers SDIO peripheral was used for primary storage and an external flash for secondary.
Chan’s FatFS [32] was the one-way choice for the file system because it was already ported and working with support for SD cards from ST’s cubeMX, requiring minimum configuration.

Figure 3.3 FAT file system structure [60]
The other considerations were using the SD card without file system but the major issue was that the SDIO peripheral code had to be developed.
FAT in general is not suitable for safety-critical systems, failure during operation could lead to corrupted files and even corrupted file system without the possibility of recovery [33].
Moreover, as the FAT file system is structured it leads to inefficiency requiring traversing the file system in order to find where a file is in the data region and in read/write operations checking the FAT table. All of these locations are usually in not adjacent sectors leading in performance degradation.
The file system is separate into different regions such as the boot sector, file allocation table, the root directory and the data region.
Directories are special files that provide information for the records such as the type (directory, file), name and starting cluster. There are stored in the data region, except the root directory. The root directory is found in a known location and provides the starting point for traversing the file system.
An entry in the File Allocation Table is allocated for each cluster in the data region. The number in the entry points to the next cluster that the data continuous or the end of the file.
The data area is divided in parts called clusters with each cluster being a multiple of a sector, the sectors are usually 512 bytes. A sector is the minimum data transfer from or to the SD.
Chan’s implementation of FAT file systems is orientated towards microcontrollers and systems with low resources. It has a small API consisting of the basic commands such open, write, read file. The only issue is that the documentation is not very detailed with some errors returned from the commands are too general to make use.
Since a sector is the minimum data transfer, for optimized reads and writes, the data should align with a sector. better if the data fit into a sector only, leading to more efficient reads and writes, because the file system doesn’t ensure the next cluster is after the current one.
In figure 3.4 the critical operations of FatFS is listed. If a failure or interruptions occur between commands with yellow or red could result in data loss or even file system corruption. Minimizing the time, a file is opened the risk of failure is minimized as well. Figure 3.5 shows optimized code with the use of sync.


Figure 3.4 FatFS critical operations [32] Figure 3.5 FatFS optimized critical operations [32]
ECSS services
The ECSS standard is highly adaptive and provides many different choices. In this section, the design choices for UPSat are analyzed.
Services
The first choice that came up was: which services were going to be used in UPSat. Even though all services provide necessary there wasn’t enough time to implement them all.
The telecommand verification service provide a way to receive a response about the successful or not outcome of a telecommand’s operation. This service is required since for some operations it is critical to know the outcome of the operation.
The housekeeping & diagnostic data reporting service provide a way to transmit and receive information (housekeeping) that denote the status of the CubeSat. The housekeeping operation is standard in CubeSats.
The function management service is used for operations that aren’t part for other services operations. In UPSat the service is used mainly for controlling the power in subsystems and devices and setting configuration parameters in different modules.
The time management service is providing a way to synchronize time between subsystems and the ground station. This service was added later when the need to synchronize time between ADCS and OBC and the ability to change the time from the ground came up.
The on-board operations scheduling service provide a way for to trigger events in specific times or continuously with specific intervals with the release of telecommands. This service allows to perform events without having connection with the ground station.
The large data transfer service provides a way to exchange packets that are larger than the size that is allowed by cutting the original packet in chunks that their size is allowed. In UPSat it is used for transferring large files such as the SU scripts.
The on-board storage and retrieval service provide a way to store and retrieve information in mass storage devices. In UPSat it is used to store various logs, SU scripts and configuration parameters in the SD card of the OBC.
The test service provides a simple way to verify that a subsystem is working. It is very similar to the ping program used in IP networks.
The event reporting service provides a way for a subsystem to report events. It was originally designed for subsystems that didn’t have storage devices to report events that were critical to the UPSat’s operation to the OBC so that it would store them for later review from a human operator. Time restrictions didn’t allow for correct implementation and testing so it was removed.
Event-action service uses the event service to generate action when a particular event takes place. Since the event service was removed there wasn’t a way to use the event-action service.
The device command distribution service is not applicable to the UPSat design.
The parameter statistics reporting service provide a way to report statistics about specific parameters when there isn’t ground coverage. In ideal conditions this service would have been used in conjunction with housekeeping service in order to provide a better understanding of the UPSat’s status. For cases that statistics were needed the were added in the housekeeping report and the specifics of the implementation were left to the discretion of the software engineer.
The memory management service provides a way to read or write memory regions in subsystems and mass storage devices. Even though it could be helpful, there wasn’t a urgent need to implement it.
The on-board monitoring service monitors parameters and checks if there are changes that need to be reported in the ground. Again, for this service there isn’t a urgent need.
The packet forwarding control service provides a way to forward a packet to different application id than it was intended. There was the thought of using the service in order to forward specific packets to a software module that captures these packets and stores them as events in mass storage but time limitations didn’t allow to implement it.
The on-board operations procedure service allows for the ground station to store and manipulate functions in subsystems in UPSat. That service provides a way to extend and or change software functionality in a CubeSat without resorting in complex firmware updates. Unfortunately, even if this service is important, once again there wasn’t enough time to implement it.
From the 16 services only 8 were decided to with the time management service added later and the event reporting services removed during the implementation phase.
Since On-board operations scheduling service was designed and implemented from Apostolos Masiakos and Time management service from Apostolos Masiakos and Agis Zisimatos, the services won’t be analyzed further.
The specification states that any custom services or services subtypes should have an number larger than 128. In UPSat’s design this rule wasn’t followed and the custom could have any number that it’s not used from the specification. This happens because there is a a large lookup table for every subsystem which defines which services are used, the way it was implemented having 128 service number and above would create a huge lookup table that wouldn’t fit in the microcontroller’s memory.
Table 3.3 ECSS services
Service Type Service Name ————– ————————————————–
1 Telecommand verification service 2 Device command distribution service 3 Housekeeping & diagnostic data reporting service 4 Parameter statistics reporting service 5 Event reporting service 6 Memory management service 7 Not used 8 Function management service 9 Time management service 10 Not used 11 On-board operations scheduling service 12 On-board monitoring service 13 Large data transfer service 14 Packet forwarding control service 15 On-board storage and retrieval service 16 Not used 17 Test service 18 On-board operations procedure service 19 Event-action service
Table 3.4 ECSS services implemented by UPSat
Service Type Service Name ————– ————————————————–
1 Telecommand verification service 3 Housekeeping & diagnostic data reporting service 8 Function management service 9 Time management service 11 On-board operations scheduling service 13 Large data transfer service 15 On-board storage and retrieval service 17 Test service
Application ids
Application ids are a core concept in ECSS, it is the address of a module that the packet is heading towards, it is very similar to the IP address concept. Using 11 bits for application ids a total of 2047 address can be achieved. Application ids are not confounded only in hardware subsystems but software modules can be given an id.
In UPSat a total of 7 application ids were used: 5 for each subsystem and 2 for the ground station. The 2 application ids used for the ground station is because there are 2 different paths available and there was a need to differentiate them. The first is the serial connection through the umbilical connector and was used only during testing. The second was through the RF communication and the COMMS subsystem. The software is design of UPSat is simple enough so there wasn’t a need for more application ids.
Table 3.5 UPSat application ids
Sybsystem app id ———– ——– OBC 1 EPS 2 ADCS 3 COMMS 4 IAC 5 GND 6 DBG 7
Packet frame
Even if the ECSS standard treats the telecommand and telemetry as packets with different frame structure, the design intention of the packet frame in UPSat was that both of frames could be as identical as possible. The reason behind that was that the software remains as simple as possible, using the same code for manipulating telecommand and telemetry frames. The simpler design in software would lead in less developing the code and testing it. Hello if you, are reading this send a mail at nchronas at gmail dot com and say hi, I would be glad to hear from you.
The packet header and packet error control are identical in telecommands and telemetry packets. The data field header is designed to be identical with source ID in telecommands and destination ID in telemetry packets and without the optional fields of packet sub-counter and time in telemetry that don’t exist in a telecommand packet.
For routing purposes the source and destination application ID was added in telecommand and telemetry packets. When the packet is a telecommand the application ID in packet id denotes the subsystem destination and in the data header field the subsystem that the packet originated and vice versa in a telemetry packet. Without the source ID, it would be impossible to know to which subsystem a possible response should be send and without the destination ID where to route the telemetry packet. It was possible to only use the application ID by having application IDs would denote both the source and destination ID but that design would be more obscure leading to confusion during testing.
The maximum length of a normal frame is 210 bytes, by subtracting the headers and error correction it leaves with 198 bytes for application data. This number derives from restrictions in RF communication with the Earth. Because the COMMS subsystem doesn’t use error correction algorithms, if the size is larger than 210 bytes the probability that the packet is received correctly from the ground station, quickly deteriorates.
For the case of handling large files the normal packet size is inefficient and restrictive. For that reason and for subsystem communication only, the length of a packet can be extended to a maximum of 2050 bytes. The 2050 bytes is calculated from the maximum file transaction of a SU script with 2048 bytes size plus the 12 bytes of packet header. This transaction happens only for OBC-COMMS communication only. For RF communications if the size is larger than normal, the large data service is used.
The version number and data field header flag of the packet ID have the default values of 0 and 1.
The type equals to 1 if the packet is a telecommand and 0 if it is a telemetry packet.
The application ID uses only the 8 bits for efficiency but for compatibility reasons 11 bits are used in the frame.
The Sequence flags in telecommands or Grouping flag in telemetry packets are used only in standalone mode with default value equal to 3.
Table 3.6 Telecommand Data header
CCSDS Secondary Header Flag TC Packet PUS Version Number Ack Service Type Service Sub- type Source ID —————————– —————————— ——– ————– ——————- ———– 1 Bit 3 Bits 4 Bits 8 Bits 8 Bits 8 Bits
The sequence count is a counter that counts the packets that the subsystem has transmitted to another subsystem, there is a different counter for each application id. If a subsystem routes the packet to its indented destination it doesn’t modify the counter. The counter is uses 8 bits instead 14 bits as the standard for efficiency reasons. For compatibility reasons for the packet frame remains 14 bits. Every system that transmits packets frames needs to implement the counter. Moreover, the counter in UPSat is not stored in mass storage memory and it is reset to zero in each subsystem reset. By observing when the counter resets to zero in a subsystem it can be deduced that a reset happened to that subsystem.
The packet length is calculated by subtracting from the actual packet size the size of the packet header which is 6 bytes and subtracting 1.
Packet length = Packet size (bytes) - 6 (packet header) - 1
The data field header varies in a telecommand and a telemetry packet. The CCSDS Secondary Header Flag has a default value of 0 in a telecommand and it’s used as padding in a telemetry packet. The Ack is used in a telecommand from the verification service and as padding in a telemetry since the verification service doesn’t work with telemetry packets.
In both telecommand and telemetry packets the Packet PUS Version Number has a default value of 1.
The service type and subtype denote the functionality of the packet and the service associated with the packet.
In a telecommand the source ID denotes the application ID of the subsystem that the packet originates from and in a telemetry packet the destination ID denotes the destined subsystem. Both the source and destination ID reside in the same position in a telecommand and telemetry packet.
The Packet error control is implemented as a CRC8 algorithm that occupies 8 bits but for compatibility reasons the frame has 16 bits with the first 8 bits are unused.
The packet sub-counter and time fields in a telemetry packet are not used because there wasn’t any need for them in UPSat.
Finally, no optional spare fields were added in both telecommand and telemetry packets.
Table 3.7 Telemetry Data header
Spare TM Packet PUS Version Number Spare Service Type Service Subtype Destination ID ——- —————————— ——– ————– —————– —————- 1 Bit 3 Bits 4 Bits 8 Bits 8 Bits 8 Bits
Table 3.8 Command and control packet frame

Services in subsystems
The table 3.9 provide information about which service is implemented in each subsystem.
Verification, housekeeping, function and test service are basic services needed in all subsystems.
Time management is only used in ADCS and OBC since only them require precision time keeping, OBC for the SU and ADCS for the control calculations.
On-board scheduling and On-board storage services are only used in OBC since they require a mass storage device.
Finally, large data transfer is only implemented in COMMS since it is the only capable for RF communications.
Table 3.9 Services implemented in each subsystem.
OBC EPS ADCS COMMS ------------------------------------------ ----- ----- ------ ------- Telecommand verification v v v v Housekeeping & diagnostic data reporting v v v v Function management v v v v Time management v x v x On-board operations scheduling v x x x Large data transfer x x x v On-board storage and retrieval v x x x Test v v v v
Software reuse
One of the first software design decisions was that since the ECSS software is generic and could be used in future missions, the software modules should be designed to be agnostic to the hardware used. For that reason, direct call functions that were hardware related was prohibited and a HAL layer that was a essentially a wrapper for the STM libraries was used.
Telecommand verification service
The Telecommand verification service is the 1. In table 3.11 are shown the minimum and additional capabilities offered by the services. The service is used when a telecommand has the values shown in table 3.10 The service doesn’t support telemetry packets.
For UPSat it was decided that only the minimum capabilities would be used, even if the additional would be definitely helpful they would also complicate the software design. For that reason, only values of 0 and 1 are valid in the ACK field, if other values are present the packet is flagged as invalid and dropped.
Since most of the telecommands are usually finished immediately, the acceptance report means also the competition of the telecommand but the semantics of the acceptance should be considered to be a telecommand.
If the telecommand results in failure, the frame has an error code field. By checking the error code, the ground station operators could find the reason for the failure and make correcting procedures accordingly. The ECSS standard provides some error codes about packet decoding failure listed in table 3.10.
One particular idiosyncrasy of the service is found in the table 3.14 where are listed errors about packet decoding such as error 2 incorrect checksum, that leads reporting acceptance failure about a packet that could have corrupted information including the ACK field.
Table 3.10 Telecommand packet data ACK field settings
Value meaning ——- ————————————- 0 none 1 Acknowledge acceptance 2 Acknowledge start of execution 4 Acknowledge progress of execution 8 Acknowledge completion of execution
Table 3.11 Telecommand verification service subtypes
minimum capabilities ————————————————– ——- Telecommand acceptance report - success Telecommand acceptance report - failure Additional capabilities Telecommand execution started report - success Telecommand execution started report - failure Telecommand execution progress report - success Telecommand execution progress report - failure Telecommand execution completed report - success Telecommand execution completed report - failure
Table 3.12 Telecommand verification service acceptance report frame
Telecommand Packet ID Packet sequence control ———————– ————————- 16 bits 16 bits
Table 3.13 Telecommand verification service acceptance failure frame.
Telecommand Packet ID Packet sequence control Error ———————– ————————- ——– 16 bits 16 bits 8 bits
Table 3.14 Telecommand verification service error codes
Value meaning ——- —————————————— 0 illegal APID 1 incomplete or invalid length packet 2 incorrect 3 illegal packet type 4 illegal packet subtype 5 illegal or inconsistent application data
Housekeeping
Information indicating the status of the CubeSat, are broadcasted to earth, in specific intervals. WOD is transmitted automatically, so it can be easily gathered by ground stations that don’t have transmit capabilities.
UPSat has 3 different WODs and each is used for different purposes:
-
QB50 WOD.
-
Extended WOD.
-
CW WOD.
The QB50, extended and CW WOD, is used for understanding the state of UPSat. It is the last line of defense in the case there isn’t a communication link between ground stations and UPSat. It is going to be the first indication if UPSat works correctly or not. The CW WOD is crucial during the first days of operation, in order to track and verify the operation of UPSat. Since HAM operators around the globe could listen for CW WOD, a global coverage can be obtained.
WOD
In the QB50 requirements, there is WOD. In the frame, it provides historical information. The dataset provides general information. For compatibility with the rest of the missions in QB50, WOD is not encapsulated in ECSS.
Table 3.15 WOD packet format

Table 3.16 WOD dataset

Extended WOD
Since WOD offers only basic information, it was decided to add an independent extended WOD. That would provide more information about the state of UPSat. It was asked of all engineers to supply a set of variables, that would help them understand what happens in the subsystems. A small refactored happened in order to fit all data in a single frame. Extended WOD is encapsulated in a ECSS frame.
CW WOD
In addition to WOD and extended WOD, a CW WOD was added. The reason was that CW has better chances of receiving it from the ground than the FSK modulated WOD and extended WOD. Moreover, in CW there isn’t a need for complicated demodulation hardware, even a human with proper training can understand it. The disadvantage of CW and the reason that it hosts minimal information, is that it has far lower data rate than FSK and higher consumption due to lower data rate.

Figure 3.6 CW WOD frame

Figure 3.7 CW WOD dataset
Housekeeping & diagnostic data reporting service
In this service, the design has deviated a lot from the specification. In the specification, each housekeeping structure send a report in specific intervals. There are also functions that implement new structures and modify the intervals that the reports are generated.
For the UPSat, a different, simpler design was followed: OBC would send a telecommand report parameters request (3,21) and the subsystem would respond with a telemetry parameters report (3,23). OBC handles all the timing and not the service. In the request, there is the structure ID that the OBC wants. The structure ID is most of the times general and the parameters in report are in conjunction with the subsystem that reports it. For WOD variants the OBC gathers the health and extended health reports, forms the WOD variant structures and then transmits it to earth. Some subsystems have structure IDs that are specific to them. Finally. the ground station could also send a request for a parameter report and receive the response.
Even though the request/response mechanism works well, a design that uses intervals as specified in the ECSS standard would have been a better solution for 3 reasons:
-
It removes the task of sending requests.
-
Minimizes traffic.
-
Easier to change intervals.
Table 3.17 Housekeeping service structure IDs
Structure ID name Structure ID Meaning ——————- ————– ———————————- HEALTH_REP 1 Health report EX_HEALTH_REP 2 Extended health report EVENTS_REP 3 Events report WOD_REP 4 WOD report EXT_WOD_REP 5 Extended WOD report SU_SCI_HDR_REP 6 SU science header report ADCS_TLE_REP 7 ADCS TLE report EPS_FLS_REP 8 EPS flash memory contents report ECSS_STATS_REP 9 ECSS statistics report
Table 3.18 Housekeeping service request structure id frame
Structure ID ————– 8 bits
Table 3.19 Housekeeping service report structure id frame
Structure ID Data ————– ————— 8 bits 1 - 1584 bits
Function management service
The Function management service has service type 8 and only one service subtype called perform function (8,1) which is a telecommand.
Each subsystem performs different functions, each device ID is associated with on/off or set value action and a subsystem
Table 3.20 provide the data frame structure. There are 2 groups of actions: power control which turns on and off a device and a set value which configures the device ID parameters. Since set value is specific to each device ID the values following is specified with the device ID, the power control doesn’t need a value. Table 3.21 show which subsystems implement each device IDs and what action is associated with.
Table 3.20 Function management service data frame
Function ID Device ID Data ————- ———– ————– 8 bits 8 bits 0 - 640 bits
Table 3.21 Function management services in each subsystem
Name Sybsystem Function ID Device ID ————— ———– ————– ——————- Power control EPS 0: off 1: on OBC ADCS COMMS SU ADCS 0: off 1: on GPS Sensors OBC 0: off 1: on IAC ADCS 3: Set value Magnetorquers ADCS 3: Set value Spintorguers ADCS 3: Set value TLE ADCS 3: Set value Control gains ADCS 3: Set value Setpoint COMMS 3: Set value WOD pattern EPS 3: Set value Write flash
Large data transfer service
The specification has 2 ways for ensuring that a transfer has been completed successfully. In the first one, every time packet that is successfully received sends an acknowledgement. In order to send the next one, an acknowledgement should have been received for the previous one. The second technique uses a sliding window, where multiple parts are send and the acknowledgement verifies the packets up to the part. In UPSat, for uplink an acknowledgement for each packet is required and for downlink a modified sliding window is used.
The Large data transfer service have 2 different parts: the software running in UPSat and the one running in the ground station. Since UPSat has less resources, is more difficult to write code for UPSat and after a point the software won’t be able to change, it was decided that the operation complexity should be handled from the ground station’s software, whenever that was possible. For that reason, there was a different approach for the service design if the transfer was initiated from UPSat (downlink) or from the ground station (uplink).
For downlink, UPSat sends all the parts with 1ms delay in each transfer and waits for a specific timeout period. The first part is denoted as, all intermediates with and the final part with. During that period, the ground station should send for a packet retransmission if it didn’t receive it properly or that all packets were successfully received. If that time period expires without an acknowledgement, the service aborts the transfer.
When the ground station receives large data transfer packets, checks if there any packets missing and asks for retransmission. If there aren’t any packets missing, it sends that the transfer finished successful. In the case that the last part hasn’t been received, the ground station requests the next part, until the last one is send.
For uplink, the ground station initiates a new transfer by sending the first part, if UPSat receives it, it sends an acknowledgement. If the ground station doesn’t receive the acknowledgement, it retransmits the packet. This continues till the last part or if the operation timeouts.
For both of transfers uplink and downlink, the ground station is responsible of retransmitting a packet in a time frame that is less than the time of UPSat’s timeout, if the ground station hasn’t got a proper response, either a acknowledgment in the case of uplink or the part that ground station requested in a downlink.
For keeping the design simple enough, it was decided to allow only one transfer at the time for both of the uplink and downlink. For the case, it was decided in the future to allow multiple transfers, a large data unit ID was added in the data frame, that ID shows which transfer that packet belongs to. For the current design if a packet arrives that has different ID than current transfer, it drops the packet.
The sequence number shows where the data should be placed when the original packet is reconstructed. For uplink if a packet arrives that has a larger sequence number than the one expected, the packet is dropped, that simplifies the design and it doesn’t allow broken packets. For the current design a maximum of 11 parts are allowed.
Each part should have the max size of 196 bytes from max data size of 198 bytes minus the 2 bytes of the large data transfer service header, except the last part.

Figure 3.8 Large data transfer split of the original packet
Table 3.22 Large data transfer service transfer data frame.
Large data unit ID Sequence number Service data unit part ——————– —————– ———————— 8 bits 8 bits 1 - 1568 bits
Table 3.23 Large data transfer service acknowledgement frame
Large data unit ID Sequence number ——————– —————– 8 bits 8 bits
Table 3.24 Large data transfer service repeat part frame
Large data unit ID Sequence number ——————– —————– 8 bits 8 bits
Table 3.25 Large data transfer service abort transfer frame
Large data unit ID Abort reason ——————– ————– 8 bits 8 bits
On-board storage and retrieval service
The first design choice was that the file names for the logs should only be numbers and not characters. That has the advantage of lower size overhead when there is ground to UPSat communication e.g. the file name as a string could be 8 characters long meaning 8 bytes as string when the equivalent number 99999999 only uses 4 bytes. Moreover, file operation could be performed with simple mathematics e.g. The next file name could be found by adding 1 to the current file name.
For the logs storage design, it was decided to use one file per log entry. This approach adds great size overhead since the minimum size a file occupies is 512 bytes but simplifies the actions needed to operate (retrieve, delete, store) with a log entry. A maximum file number of 5000 is defined, that way it is ensured that logs can’t consume all the disk size.
For the logs, on top of the file system an extra layer was added. A circular buffer was used with the head and tail pointers pointing into files. All logs must be placed in sequential manner into files. Using that mechanism, the logs operation is simplified: First when a log entry is deleted it doesn’t actual delete the file, leaving the data intact in case there is a need to retrieve it and saves time by not calling the delete function of the file system. Secondly when a downlink operation happens there is no need to know the actual file name, only the log number should be specified and the file name is found by adding the head pointer file name number and the log number e.g. if the head points to a file with a name 5 the 3rd log that is stored is found by adding 5 and 3 resulting in the file name 8.
Service subtype Enable (15,1) and Disable (15,2) control the power of the SD card, there is no data used. Instead of using the function management for power control of the SD it was decided to use the specification’s mechanism.
Service subtype Downlink (15,9) and the response Content (13,8) provide a way to download a file from UPSat. The telecommand downlink provides the storage ID, the file name and if batch download is needed, the number of files. Batch download is used for logs only. For batch download, the files are sequential to the file name specified in the telecommand. The response has the storage id, the file name and the file content and if batch download is used, the next file name and file content.
Service subtype Delete (15,11) has multiple functionality. The first field is the storage ID that the delete function should act. Second field is the mode. Depending on the mode the delete has different functionality. When the storage ID is SU script 1-7 the script is deleted, with mode to be irrelevant. The mode FS reset with a logs storage ID, resets the file system, this is used in the case there is an issue with the file system. The hard delete mode is used with the logs storage ID and deletes all the files in storage ID. Also, when the hard delete is used with the SRAM storage ID, it initializes the static memory region on the OBC to zero. The hard delete mode should be only used when there is an issue with file system. The delete all mode used with logs clears the pointers used and finally the delete to mode used again with logs removes entry logs from the pointers.
Service subtype Report (15,12) and the response Catalogue Report (15,13) provide a report about the state of the storage. The report is separated in 2 parts. The first parts provide the information about the 7 SU scripts: if there is a valid script, the scripts file size and time modified. The second part provide the information about the WOD, extended WOD and SU logs storage: The number of files, The last log size and timestamp and the firsts log size and timestamp.
Service subtype Uplink (15,14) uploads files in the storage that is defined in the frame. It only used for SU script files but for debugging purposes it is possible upload to other storage IDs.
Custom service subtype 15 uses the FatFS format function and formats the SD card. This was added in the case the file system gets corrupted and it’s unusable from the OBC.
Custom service subtype List (15,16) and the response Catalogue List (15,17) provide information for the underlying file system. It is used only for logs since the SU script files information are properly shown in the Report. This is subtype is complimentary to the report functionality and it should be used only for debugging purposes because in the presence of many files it could use a lot of resources. It is highly probable that all the files information can’t fit into a single packet and multiple packets have to be used. For that reason, the List telecommand has a field that if it’s not zero it denotes the file name that it should continue the listing. In the response, there is the field that contains 0 if all files are listed or the name of the file that should access in the next packet iteration.
Test service
The test service is very simple. It has the 17 service type and only 2 subtypes: perform test (17,1) and report test (17,2). The service doesn’t use any application data.
Table 3.26 On-board storage and retrieval service uplink subtype frame
Store ID File File data ———- ——— —————- 8 bits 16 bits 1 - 16384 bits
Table 3.27 On-board storage and retrieval service downlink subtype frame
Store ID File Number of files ———- ——— —————– 8 bits 16 bits 16 bits
Table 3.28 On-board storage and retrieval service downlink content subtype frame
Store ID File File data ———- ——— ———– 8 bits 16 bits 1- 16384
Table 3.29 On-board storage and retrieval service subtypes used on UPSat
Name Service subtype Explanation —————————————————– —————– ———————————————— ENABLE 1 Turns on the SD card DISABLE 2 Turns off the SD card CONTENT 8 File contents DOWNLINK 9 Download a file request DELETE 11 Delete files REPORT 12 Storage status report request CATALOGUE REPORT 13 Storage status report response UPLINK 14 File upload FORMAT 15 Formats the SD card, custom service LIST 16 List file information request, custom service CATALOGUE LIST 17 List file information response, custom service
Table 3.30 On-board storage and retrieval service delete subtype frame
Store ID mode to —————– ————- ——— SU script 1 - 7 None None SRAM hard delete None Logs hard delete None Logs FatFS reset None Logs Delete all to Logs * to 8 bits 8 bits 16 bits
Table 3.31 Store IDs
Name ID ————- —- SU NOSCRIPT 0 SU SCRIPT 1 1 SU SCRIPT 2 2 SU SCRIPT 3 3 SU SCRIPT 4 4 SU SCRIPT 5 5 SU SCRIPT 6 6 SU SCRIPT 7 7 SU LOG 8 WOD LOG 9 EXT WOD LOG 10 EVENT LOG 11 FOTOS 12 SCHS 13 SRAM 14
Table 3.32 On-board storage and retrieval service catalogue list subtype frame
Store ID information File information
———————- —————— ———– ———– ———– —————— ————-
Store ID Starting file Next file
8 bits 16 bits 16 bits
Table 3.33 On-board storage and retrieval service catalogue report subtype frame
Type Store ID information ——————————————————- ———————- ————— ——————– —————- ——————— SU script 1-7 Valid SU script 8 bits WOD, EXT WOD, SU Logs Number of logs 16 bits
Implementation
In this chapter, the implementation of the ECSS services and the OBC software is discussed.
ST cubeMX

Figure 4.1 OBC’s CubeMX project
Most of the ARM cores are quite complex, with datasheets spanning most of the time more that 1000 pages. For that reason, most of the semiconductor companies provide libraries that facilitate the use of the ARM core and the microcontrollers peripheral for the developer.
ST offers a graphical software called STMCube that generates code according to the user’s configuration. Before that had the standard peripheral library, which is similar to the libraries other ARM semiconductor companies offer.
CubeMX libraries design differ from standard library and other libraries used in different ARM cores, thus it required more time initial to understand the designer’s intent.
Project folder organization

Figure 4.2 Project organization
ECSS services reside in a separate repository. Code that it is not in the specification but is generic and used from a number of subsystems is in the core directory along with code that is used for ECSS handling but is not defined in the standard. The services folder holds all the services implementation that is in specification. In the platform folder is the code that is specific to each subsystem, in their folder respectively. Inside each subsystem’s folder there is a HAL/STM32 folder that has the subsystem’s HAL. In the core subfolder, there are functions
GPS
The GPS connect to the ADCS provides with critical information about the UPSats position and UTC time reference. The NMEA parsing algorithm used in was co-developed from Agis Zisimatos.
It is worth noting that the GPS during the boot, transmits the company’s logo through the UART in a non-standard format. This led to buffer overflows that were easily fixed but valuable time was lost in the process. Even though this a common practice for commercial GPS this wasn’t expected from a GPS used in space.
The GPS transmits information into using the NMEA protocol. The NMEA uses the ‘\$’ character for a starting delimiter, the next 3-5 characters indicate the information the sentence holds, the data fields are separated by a comma delimiter, the 2 characters after the ‘*’ character denote the checksum of the sentence in hexadecimal and finally the stop delimiter of the sentence ‘\cr\nl’. For an example the GSA sentence providing the satellite status “\$GPGSA,M,3,31,32,22,24,19,11,17,14,20,,,,1.6,0.9,1.3*3E”.
The parsing algorithm works into 2 steps. First the gps_parse_fields function takes as input a buffer holding the NMEA sentence and the size of the buffer, performs the necessary checks and populates an array with the fields of the sentence. Next the gps_parse_logic function takes the array with the fields, checks if the sentence has information that is needed from UPSat and if that’s the case it updates the GPS state structure.
Listing 4.1 GPS module functions
SAT_returnState gps_parse_fields(uint8_t *buf, const uint8_t size,
uint8_t (*res)[NMEA_MAX_FIELDS]);
SAT_returnState gps_parse_logic(const uint8_t (*res)[NMEA_MAX_FIELDS],
_gps_state *state);
HLDLC
Protocols like SPI and $I\^2C$ it is possible to transfer multiple byte with one transaction. That way a transaction signifies a packet transfer. UART on the other hand transfers a byte at the time thus leaving no way to know when a packet starts or stops. For that reason, for UART subsystem communication, there are 3 options to pass the ECSS frames:
-
ASCII characters.
-
Binary protocol with length.
-
HLDLC algorithm.
Use ASCII and have unique in the frame delimiters like ‘,’ and newline for frame endings. The use of ASCII is a good choice because it is easier to implement, it is easier for a human to debug since the data can be read. Unfortunately, ASCII requires more processing power in order to convert strings to numbers, requires more time to transfer and need more memory than a binary protocol. A good example for an ASCII protocol is the NMEA, which is used in all modern GPS receivers.
Use common delimiters but have a length field with the number of bytes in the packet, in the beginning of each packet and use that to calculate when the packet ends. This approach would require a timeout to discern different packets in the case there is an error. The advantage of that approach is that the implementation is easy and quick. The main disadvantage is the error handling is very poor in the case there are failures in the transfer.
The method that was eventually used, uses an algorithm that modifies the original data so there are unique delimiters. The disadvantage it has is that it could add up 2x times size overhead of the original data and it cannot be used when a fixed packet length is required. The main advantages are that is fairly easy to implement, it doesn’t use much processing resources, O(n) time is needed and makes fault tolerant mechanisms easy to implement. A similar mechanism is used for CSP when the transfer is over UART. During testing the overhead that was observed in most packets was minimum.
The HLDLC is very easy: There is the frame boundary byte, which is 0x7E that signifies the start and stop of every packet and the control escape byte 0x7D. In the case there is the frame boundary byte or the control escape byte inside the data frame, a control escape byte is inserted and the 5th bit is inverted e.g. if there is the 0x14 0x7E 0x55 0x7D 0x14 byte frame the frame is modified into 0x7E 0x14 0x7D 0x5E 0x55 0x7D 0x5D 0x14 0x7E [61].
The HLDLC module is very simple, it has 2 functions: one for adding HLDLC in a packet and one to deframe the HLDLC. The functions only need the buffer that has the data and the buffer that stores the modified data, plus the size of the original buffer that returns the size of the modified data. The deframe function checks for HLDLC integrity. The return code is SATR-EOT when it was successful or SATR-ERROR when there was an error.
Listing 4.2 HLDLC module functionsh
SAT_returnState HLDLC_deframe(uint8_t *buf_in, uint8_t *buf_out, uint16_t *size);
SAT_returnState HLDLC_frame(uint8_t *buf_in, uint8_t *buf_out, uint16_t *size);
Packet Pool
Table 4.1 Number of packets and data payload sizes in each subsystem
OBC EPS ADCS COMMS --------------------- ------- ------ ------ ------- Normal 210 bytes 16 10 16 16 Extended 2050 bytes 4 0 0 4 Total 20 10 16 20 Total bytes 11560 2100 3360 11560
Since malloc is prohibited, there was a need for a memory storing mechanism for ECSS packets.
A fixed array of the packet structure was used. An array with the same number of elements denotes the status of the corresponding packet, a status of free or active.
There are 4 operations for the packet pool:
-
Initialize.
-
get packet.
-
free packet.
-
idle.
The initialize function must be called before the packet pool can be used. It initializes all packet structures payload data pointers with the data arrays allocated. If any other operation is performed before the Initialize function is called, will result in error.
The get packet function returns a free packet from the packet pool. The function iterates the array until a free packet is found, changes the flag to active and returns the address of the structure. If there isn’t a free packet it returns NULL. The software module calling the get packet function should check for a NULL pointer. It takes the size needed for a parameter.
The free packet function returns a packet to the pool. It takes the address of the packet that it frees as a parameter, iterates the packet array and when the address is found, the status changed to free. If the address is not found in the array nothing happens.
The idle function is used for fault tolerance. In case there is an error or a bug in the code and packets are not freed when after their use had ended, it would end filling all pool after a time. For that reason, a timestamp field was added and every time a new packet became active the systick’s time was copied. If the current systick time minus the timestamp is larger than a threshold it assumed that the packet was not active and freed the packet. The threshold was set to 2 minutes which was far greater than the time that a packet stays active observed during testing. Since this behavior is not expected to happen frequent, this function is intended to run on the idle time of the CPU.
Since this code is used in all subsystems that have different memory constraints, preprocessor statements are used to modify the number of packets and their data size.
The maximum size of a data payload is around 2k bytes which is the maximum file size of a SU script. The maximum packet that can be transferred through COMMS is 210 bytes, for more than that the large transfer data service is used.
There are 3 groups of data sizes that can be distinguished:
-
Telecommands that are up to 80 data bytes.
-
Housekeeping packets that can reach the maximum of 210 bytes.
-
Mass storage service operations that can reach to 2kbytes.
Since only COMMS and OBC is using the 2k data sizes and EPS has strict memory constraints, it was decided to have 2 types of packets: one normal with maximum size of 210 bytes and the extended that reaches 2k bytes of data payload. For simplification 2 types are used instead of 3.
A more elaborate scheme for the packet pool memory model was considered, with allocated data blocks of 210 bytes and for an extended data the packet would occupy the blocks required but it has 2 main disadvantages:
-
Possible fragmentation would slow packet processing.
-
The algorithm for handling of the block allocation would be more complex and would require more time for testing and development.
A note about thread safe implementation: the free function doesn’t require mutex protection because each packet can be freed once and the operation is atomic. The get packet was a candidate but there isn’t a problem for all subsystems since the function is not used in ISRs and on the OBC the function is only used in the serial task.
Listing 4.3 packet pool module functions
tc_tm_pkt * get_pkt(uint16_t size);
SAT_returnState free_pkt(tc_tm_pkt *pkt);
uint8_t is_free_pkt(tc_tm_pkt *pkt);
SAT_returnState pkt_pool_INIT();
void pkt_pool_IDLE(uint32_t tmp_time);
Queues
When a packet is about to be shipped in another subsystem, the pointer of the packet structure is pushed in a queue according to the destined subsystem. The OBC has 4 queues responding to to each subsystem the OBC connects. The other subsystems have only 1 queue since they connect only to the OBC. The export packet function checks if the queue is not empty and if the UART peripheral is available and if that’s the case, it pops the structure’s pointer and then sends it.
There are 2 queue implementations: the first one is exclusively used from the OBC and utilizes the queue mechanism of the FreeRTOS which is thread safe. Since the other subsystems don’t use FreeRTOS there is no need for the added complexity so a simple queue implementation is used.
The queue functions are defined in the core folder. Since the OBC uses the FreeRTOS queues, the API calls have been placed in HAL wrapper functions in order to sustain compatibility with the other codebase. The queue module functions are the basic used in queues: with push a packet structure is added in the queue, pop gets a packet from the queue if it has one, size returns the number of packets in the queue and the peak gets a packet with removing it from the queue and finally the idle was developed for fault tolerance but it wasn’t used.
Listing 4.4 Queue module functions
SAT_returnState queuePush(tc_tm_pkt *pkt, TC_TM_app_id app_id);
tc_tm_pkt * queuePop(TC_TM_app_id app_id);
uint8_t queueSize(TC_TM_app_id app_id);
tc_tm_pkt * queuePeak(TC_TM_app_id app_id);
void queue_IDLE(TC_TM_app_id app_id);
Hardware abstraction layer
The hardware abstraction layer (HAL) provides a way for the ECSS services to remain pure from the hardware thus making it easier for swapping to different hardware. Moreover, since there are different types of microcontrollers in each subsystem, plus each subsystem could use different version of the libraries.
From the beginning the coding rule was that: hardware specific code could only exist in the HAL directories of the ECSS repository.
Most of the functions, simply wrap the cubeMX libraries calls.
Most of the code is similiar in all subsystems, except for the OBC’s UART related code which resides in the uart-hal module.
A good example for the usefulness of the HAL layer is the delay and get tick functions. Using a HAL layer and wrapping the delay enables to use different functions for time delays, in the OBC which has needs to call the FreeRTOS delay and in the other subsystems were the cubeMX bare metal delay is called. The get tick HAL function allows to easily change a timer providing different tick resolutions if it is needed.
Listing 4.5 ADCS HAL function example
void HAL_sys_delay (uint32_t sec) {
HAL_Delay(sec);
}
uint32_t HAL_sys_GetTick() {
return HAL_GetTick();
}
Listing 4.6 OBC HAL function example
void HAL_sys_delay(uint32_t msec) {
osDelay(msec);
}
uint32_t HAL_sys_GetTick() {
return HAL_GetTick();
}
Peripheral modes
In this section, the operation modes of the microcontroller’s peripheral will be discussed while focusing in the UART. Peripherals like SPI and I^2^C have similar functionality. The UART and most of the STM32F4’s peripherals have 3 modes of operation:
-
blocking.
-
interrupt.
-
DMA.
The first mode is very simple, the function constantly checks a flag, probably a SFR bit. When the bit changes state, it signals an event like a new character is received or a character has finished transmission.
The interrupt mode uses the built-in hardware functions in order to free the CPU from constantly checking a SFR. When an event happens, the CPU stop the normal operation and jumps to an ISR function that handles the event. That way CPU cycles are only used for the processing of the event.
Finally, when the DMA mode is used, the events are processed without the use of the CPU. In particular usually a buffer address is configured along with the size of the data. During receive the buffer is filled automatically and in transmission the data are taken from the buffer. When the transmission is finished or when the data received are reached the size defined an ISR is triggered signaling the events end.
The blocking mode has simpler operation but it wastes CPU cycles for constantly checking the SFR. This is great reduced with the interrupt mode but there is some overhead. The DMA mode is the most efficient mode of operation with no overhead but while the other modes don’t have a restriction on the number of characters, the DMA is only efficient when used with a predefined fixed number of characters.
Listing 4.7 UART cubeMX HAL peripheral modes function examples
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
The cubeMX HAL provide 3 set of functions: blocking, interrupt and DMA. The only difference in the provided functions is in the blocking mode where a timeout parameter is added. It is worth noting that in all 3 different types of microcontrollers used in UPSat have the almost the same implementation. This simplifies and reduces the time needed for the implementation of the ECSS handling.
While the blocking and DMA functionality is as expected, the interrupt mode for reception is not. The interrupt mode reception requires a predefined number of characters which doesn’t work well with the non-fixed packet length. For that reason, custom handlers were written for the reception.
The UART is used for 3 different operations in UPSat:
-
Science unit handling.
-
GPS reception.
-
ECSS packet handling.
In all cases, for transmission since the size of the data is known beforehand the DMA mode is used.
Listing 4.8 UART 1 peripheral IRQ function example
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
SEGGER_SYSVIEW_RecordEnterISR();
HAL_OBC_UART_IRQHandler(&huart1);
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
SEGGER_SYSVIEW_RecordExitISR();
/* USER CODE END USART1_IRQn 1 */
}
When the interrupt mode is used and when an interrupt occurs, the ISR handler USARTn-IRQHandler is called that is in stm32f4xx-it.c file. Inside the handler the HAL-UART-IRQHandler is called. That function has check flags that show what event happened, calls the corresponding event handler and clears the flags.
In order to make the custom handler the ISR handler HAL-UART-IRQHandler was copied and striped of all functionality that wasn’t related in UART reception. The HAL-subsystem-UART-IRQHandler function is placed before the USARTn-IRQHandler in order to intercept the received character. Inside the HAL-subsystem-UART-IRQHandler the modified UART-Receive-IT is called. This function holds the processing algorithm and it’s different for the 3 cases. The existing huart structures of the cubeMX HAL were used for the UART processing.
The SU sends data in fixed packet length of 180 bytes. In this case the DMA mode could had been used but the interrupt mode is used instead because error checks are performed and in the event of successful reception the OBC UART task is called.
For the GPS handling, the ISR function stores the incoming bytes into the GPS buffer when the ‘$’ start character is received, finishes when the stop bits arrive and switches buffer location in order to store the next sentence,
The UART-subsystem-Receive-IT function handles incoming ECSS packets encapsulated in a HLDLC frame. The function stores the packet in a temporary buffer with the HLDLC encapsulation while performing error checking of the HLDLC frame. At first the intention was that the HLDLC decapsulation should be performed in the ISR but after the initial tests that design was abandoned because it made the ISR more complex than wanted, instead the decapsulation happens after the whole packet reception in the import function. The error checks performed are for the HLDLC packet validity: start and stop flag and if the packet length exceeds the minimum or maximum size of an ECSS packet.
Listing 4.9 UART IRQ function ECSS packet handler
void UART_OBC_Receive_IT(UART_HandleTypeDef *huart)
{
uint8_t c;
c = (uint8_t)(huart->Instance->DR & (uint8_t)0x00FFU);
if(huart->RxXferSize == huart->RxXferCount && c == HLDLC_START_FLAG) {
*huart->pRxBuffPtr++ = c;
huart->RxXferCount–;
uart_timeout_start(huart);
} else if(c == HLDLC_START_FLAG && (huart->RxXferSize - huart->RxXferCount) < TC_MIN_PKT_SIZE) {
err++;
huart->pRxBuffPtr -= huart->RxXferSize - huart->RxXferCount;
huart->RxXferCount = huart->RxXferSize - 1;
*huart->pRxBuffPtr++ = c;
uart_timeout_start(huart);
} else if(c == HLDLC_START_FLAG) {
*huart->pRxBuffPtr++ = c;
huart->RxXferCount–;
uart_timeout_stop(huart);
/* Disable the UART Parity Error Interrupt and RXNE interrupt*/
| CLEAR_BIT(huart->Instance->CR1, (USART_CR1_RXNEIE | USART_CR1_PEIE)); |
/* Disable the UART Error Interrupt: (Frame error, noise error, overrun error) */
CLEAR_BIT(huart->Instance->CR3, USART_CR3_EIE);
/* Rx process is completed, restore huart->RxState to Ready */
huart->RxState = HAL_UART_STATE_READY;
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
vTaskNotifyGiveFromISR(xTask_UART, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
} else if(huart->RxXferSize > huart->RxXferCount) {
*huart->pRxBuffPtr++ = c;
huart->RxXferCount–;
} else {
err++;
}
if(huart->RxXferCount == 0U) // errror
{
huart->pRxBuffPtr -= huart->RxXferSize - huart->RxXferCount;
huart->RxXferCount = huart->RxXferSize;
err++;
}
}
ECSS services
The services folder contains all the code related to the services implemented in the ECSS document. Each service is implemented in a module that is uncoupled with each other, The services module contains all the configuration parameters for the services. The service utilities contain functions that are helpful for the ECSS services. If a service need information that is specific to a subsystem it uses the function that is defined in the platform folder in the respective file e.g. housekeeping for the housekeeping service. The subsystem-id file has all the application ids of UPSat.
A single-entry point for all incoming packets is used for a better modular design and is denoted by the -app. Each function that belongs to a module start with the service name e.g. mass-storage-app. The function must end with -api if that function could be used from another module but that rule was later discharged due to project time limitations.
upsat module
The upsat module has a collection of functions that are used from all subsystems together with with the ECSS services.
Listing 4.10 upsat module functions
void sys_refresh();
SAT_returnState import_pkt(TC_TM_app_id app_id, struct uart_data *data);
SAT_returnState export_pkt(TC_TM_app_id app_id, struct uart_data *data);
SAT_returnState sys_data_INIT();
SAT_returnState test_crt_heartbeat(tc_tm_pkt **pkt);
SAT_returnState firewall(tc_tm_pkt *pkt);
The import and export packet functions are used for processing incoming packets and transmitting packets through the UART to their corresponding subsystem.
The import and export packet function takes the application ID that the function operates for and the respectively data that are packed into the uart-data structure.
The import packet functions check if there is a new packet, it is deframed from HLDCL encapsulation, unpacket into a packet taken from the packet pool and if those process are finished without error the packet is routed into the respectively services handler or forwarded to another subsystem. The verification service handler is called then and finally if the packet is for that subsystem it is returned to the packet pool since all processing is finished. If the packet is for another subsystem the packet is freed when the export packet function finishes.
The export packet function checks if the UART peripheral is not transmitting another packet which in that case isn’t anything more to do until the packet is finished transmitting. After that it checks if there is any packet in the queue, if there is the packet is packed from the packet structure into a temporary buffer array, HLDLC encapsulation, transmit ion from the UART and finally the packet is returned to the packet pool.
At first the export packet was called directly when a new packet was created and needed to forward it to its destination. That created 2 issues: First in the case the export packet was used inside the import packet e.g. for a telecommand response, the import had to wait for the export function to send it. If the UART was already used from another packet, it had to wait for that operation to finish as well. That could lead in packet loss if a new packet arrived while the import function was in use. Also it created unwanted coupling between the import and export module. Secondly for the OBC which is multithreaded, it created race conditions.
The solution of this problem was the use of queues. Each time a new packet is generated the pointer to the structure is pushed in the queue of the destined subsystem. When the export packet is called, the packet pointer is retrieved from the the queue. This uncouples the 2 functions. The race conditions is solved by the way that the export function is called from only one place, so the pop function of the queue is atomic. The push function which can be used from all the threads is solved through the use of FreeRTOS queues that have build in mechanisms for thread safety protection.
Listing 4.11 import function
SAT_returnState import_pkt(TC_TM_app_id app_id, struct uart_data *data) {
tc_tm_pkt *pkt;
uint16_t size = 0;
SAT_returnState res;
SAT_returnState res_deframe;
res = HAL_uart_rx(app_id, data);
if( res == SATR_EOT ) {
size = data->uart_size;
res_deframe = HLDLC_deframe(data->uart_unpkt_buf, data->deframed_buf, &size);
if(res_deframe == SATR_EOT) {
pkt = get_pkt(size);
if(!C_ASSERT(pkt != NULL) == true) { return SATR_ERROR; }
if((res = unpack_pkt(data->deframed_buf, pkt, size)) == SATR_OK) {
route_pkt(pkt); }
else {
pkt->verification_state = res;
}
verification_app(pkt);
TC_TM_app_id dest = 0;
if(pkt->type == TC) { dest = pkt->app_id; }
else if(pkt->type == TM) { dest = pkt->dest_id; }
if(dest == SYSTEM_APP_ID) {
free_pkt(pkt);
}
}
}
return SATR_OK;
}
Listing 4.12 export function
SAT_returnState export_pkt(TC_TM_app_id app_id, struct uart_data *data) {
tc_tm_pkt *pkt = 0;
uint16_t size = 0;
SAT_returnState res = SATR_ERROR;
/* Checks if the tx is busy */
if((res = HAL_uart_tx_check(app_id)) == SATR_ALREADY_SERVICING) { return res; }
/* Checks if that the pkt that was transmitted is still in the queue */
if((pkt = queuePop(app_id)) == NULL) { return SATR_OK; }
pack_pkt(data->uart_pkted_buf, pkt, &size);
res = HLDLC_frame(data->uart_pkted_buf, data->framed_buf, &size);
if(res == SATR_ERROR) { return SATR_ERROR; }
if(!C_ASSERT(size > 0) == true) { return SATR_ERROR; }
HAL_uart_tx(app_id, data->framed_buf, size);
free_pkt(pkt);
return SATR_OK;
The function firewall is used on COMMS subsystem and it blocks services that are harmful to the operation of the CubeSat. The actions filtered are function management services that is directed to the EPS with commands to turn off major subsystems.
The sys-refresh is used from the ADCS and COMMS subsystems in order to send a test service packet to the EPS for the heartbeat fault detection mechanism. The function calls the test-crt-heartbeat that creates the service test packet.
Service module
The service module provides most of the information related to the ECSS services. Here all significant definitions of the ECSS specification used by software are found: services types and subtypes names are defined, the SAT-returnState that holds all states of the software, supporting type definitions of each service, definitions, packet structure and assertion macro definition along with configuration definitions like the maximum size of a packet.
The supporting type definitions of each service could had been define in each service module and maybe that design was better in terms of software separation design but it was decided to be in the service module in one place as a way for the developer or used to quickly find information about the service inputs. Moreover, a global definition file that holds the most important definitions would save the developer from searching in multiple files for key parameters.
Error codes
The ECSS module are using one enumeration for status codes that could happen during the process of a packet. The status codes are used for debugging, logging and in the verification service in the case of a telecommand failure. The enumeration plays a key part in error handling, since all functions in the ECSS module return the enumeration. The design intend was to have 1 status code for all the failures in order to easily identify the source of error, this happened in the most part but unfortunately not in the extend that was wished for.
There are status codes used for different modules. The first 6 (0-5) are defined in the ECSS standard. The 6th OK means that everything happened as planned. ERROR provides a generic name for failure. Scheduling service uses the 16-29 codes. The status codes of the FatFS are shifted between number 30-50. The final 5 provide specific errors.
ECSS packet structure
The ECSS packet structure holds packets in that form when they are process, this structure plays the prime role since most all functionality in the ECSS module revolves to a packet. Most of the field of the structure are named after the counterparts in the ECSS specification and hold the same amount of information in bytes. The only difference is the source or destination ID which the name is different according the type of the packet but it was decided to both share the same field and the structure member was named dest-id from destination ID since most of the times that it was used in the code was when the variable held the destination ID and it was easier to remember.
The only structure member that doesn’t belong to the ECSS specification is the verification-state that is a supporting variable for the verification service and holds the verification state that the packet is in. If the state was in another variable it would only make the code more complicated.
Listing 4.13 Assertion preprocessor macro definition and calling example
#define C_ASSERT(e) ((e) ? (true) : (tst_debugging(__FILE_ID__, __LINE__, #e)))
if(!C_ASSERT(*size <= UART_BUF_SIZE) == true) { return SATR_ERROR; }
Table 4.2 ECSS status codes
Name Value meaning
————————————— ——- ———————————————————————————————
Packet ILLEGAL application ID 0
Packet invalid lenght 1
Packet invalid CRC 2
Packet ILLEGAL Packet service type 3
Packet ILLEGAL Packet service subtype 4
Packet ILLEGAL application data 5
OK 6 This is not an error
ERROR 7 Generic error
EOT 8
CRC ERROR 9
Packet ILLEGAL ACK 10
ALREADY SERVICING 11
MS MAX FILES 12
Packet INIT 13
INV STORE ID 14
INV DATA LEN 15
Scheduling Service Error State Codes
SCHS FULL 16 Schedule array is full
SCHS ID INVALID 17 Sub-schedule ID invalid
SCHS NMR OF TC INVLD 18 Number of telecommands invalid
SCHS INTRL ID INVLD 19 Interlock ID invalid
SCHS ASS INTRL ID INVLD 20 Assess Interlock ID invalid
SCHS ASS TP ID INVLD 21 Assessment type id invalid
SCHS RLS TT ID INVLD 22 Release time type ID invalid
SCHS DST APID INVLD 23 Destination APID in embedded TC is invalid
SCHS TIM INVLD 24 Release time of TC is invalid
QBTIME INVALID 25 Time management reported erroneous time
SCHS TIM SPEC INVLD 26 Release time of TC is specified in a invalid representation
SCHS INTRL LGC ERR 27 The release time of telecommand is in the execution window of its interlocking telecommand.
SCHS DISABLED 28
SCHS NOT IMLP 29 Not implemented function of scheduling service
FatFs
F OK 30 (0) Succeeded
F DISK ERR 31 (1) A hard error occurred in the low-level disk I/O layer
F INT ERR 32 (2) Assertion failed
F NOT READY 33 (3) The physical drive cannot work
F NO FILE 34 (4) Could not find the file
F NO PATH 35 (5) Could not find the path
F INVALID NAME 36 (6) The path name format is invalid
F DENIED 37 (7) Access denied due to prohibited access or directory full
F EXIST 38 (8) Access denied due to prohibited access
F INVALID OBJECT 39 (9) The file/directory object is invalid
F WRITE PROTECTED 40 (10) The physical drive is write protected
F INVALID DRIVE 41 (11) The logical drive number is invalid
F NOT ENABLED 42 (12) The volume has no work area
F NO FILESYSTEM 43 (13) There is no valid FAT volume
F MKFS ABORTED 44 (14) The f mkfs() aborted due to any parameter error
F TIMEOUT 45 (15) Could not get a grant to access the volume within defined period
F LOCKED 46 (16) The operation is rejected according to the file sharing policy
F NOT ENOUGH CORE 47 (17) LFN working buffer could not be allocated
F TOO MANY OPEN FILES 48 (18) Number of open files > FS SHARE
F INVALID PARAMETER 49 (19) Given parameter is invalid
F DIR ERROR 50
SD DISABLED 51
QUEUE FULL 52
WRONG DOWNLINK OFFSET 53
VER ERROR 54
FIREWALLED 55
Listing 4.14 ECSS module packet structure definition
typedef struct {
/* packet id */
//uint8_t ver; /* 3 bits, should be equal to 0 */
//uint8_t data_field_hdr; /* 1 bit, data_field_hdr exists in data = 1 */
TC_TM_app_id app_id; /* TM: app id = 0 for time packets, = 0xff for idle packets. should be 11 bits only 8 are used though */
uint8_t type; /* 1 bit, tm = 0, tc = 1 */
/* packet sequence control */
uint8_t seq_flags; /* 3 bits, definition in TC_SEQ_xPACKET */
uint16_t seq_count; /* 14 bits, packet counter, should be unique for each app id */
uint16_t len; /* 16 bits, C = (Number of octets in packet data field) - 1, on struct is the size of data without the headers. on array is with the headers */
uint8_t ack; /* 4 bits, definition in TC_ACK_xxxx 0 if its a TM */
uint8_t ser_type; /* 8 bit, service type */
uint8_t ser_subtype; /* 8 bit, service subtype */
/*optional*/
//uint8_t pckt_sub_cnt; /* 8 bits*/
TC_TM_app_id dest_id; /*on TC is the source id, on TM its the destination id*/
uint8_t *data; /* pkt data */
/*this is not part of the header. it is used from the software and the verification service,
*when the packet wants ACK.
*the type is SAT_returnState and it either stores R_OK or has the error code (failure reason).
*it is initialized as R_ERROR and the service should be responsible to make it R_OK or put the corresponding error.
*/
SAT_returnState verification_state;
}tc_tm_pkt;
Assertions
Used directly from the JPL’s 10 rules [39], assertions are used whenever possible. It is defined as a preprocessor macro definition that calls the test-debugging function.
Most checks are for NULL pointers and wrong ranges in parameters. The checks that are using assertions are only for parameters that are invalid and denote wrong behavior. There are also used for fault containment.
Assertions are defined as a preprocessor macro, when the e expression is false the tst-debugging is called which takes the filename, the line in the file that the assertions is placed and finally the expression. These parameters help to identify where the error happened. The assertion code is taken directly from the JPL 10 rules.
Service utilities module
The service utilities module contains a collection of functions that complementary to the use of the ECSS modules.
The cnv functions converts from an uint8-t to the corresponding type (16
- 32 bits) and vice versa. Using that functions all subsystem share the same endianness type. It was designed for packet conversion from the structure to the 8-bit array used for transmission and from the raw 8-bit array to the packet structure.
There are 2 ways for converting a variable in C language to 8 bits and vice versa:
-
Using unions.
-
Using shifts and bit masking operations.
The union approach has the advantage of better code clarity.
The checksum is used for calculating the error checking byte of the ECSS packet. It is used when the packet is received for error checking and for calculating it when its for transmission. The checksum is a simple XOR based algorithm.
The STM32 that is used in all subsystems have a hardware peripheral for calculating the checksum but a software implementations was preferred even though the hardware peripheral would be more efficient. This was primary for fault tolerance issues, in the case the hardware was destroyed from the space radiation, it would render all subsystem communications useless since the checksum would fail. If there is a hardware failure in the ALU of the microcontroller that would be used from the software checksum, all operations on the microcontroller would fail, disabling the microcontroller. A hybrid solution that would check the checksum peripheral for errors and then switch to a software solution, would be ideal but the project’s time restrictions didn’t allow for the implementation.
The sys-data-init is used in initialization and initializes the state of the ECSS packet sequence counters for all the application IDs.
The create packet functions crt-pkt initializes a packet structure.
The unpack packet function gets a packet in a raw 8-bit array and it fills a packet structure while making the necessary checks. The pack packet function gets the information in a packet structure and fills a 8 bit array in order to transmit the data through the UART.
Listing 4.15 Service utilities module functions
SAT_returnState checkSum(const uint8_t *data, const uint16_t size, uint8_t *res_crc);
SAT_returnState unpack_pkt(const uint8_t *buf, tc_tm_pkt *pkt, const uint16_t size);
SAT_returnState pack_pkt(uint8_t *buf, tc_tm_pkt *pkt, uint16_t *size);
SAT_returnState crt_pkt(tc_tm_pkt *pkt, TC_TM_app_id app_id, uint8_t type, uint8_t ack, uint8_t ser_type, uint8_t ser_subtype, TC_TM_app_id dest_id);
void cnv32_8(const uint32_t from, uint8_t *to);
void cnv16_8(const uint16_t from, uint8_t *to);
void cnv8_32(uint8_t *from, uint32_t *to);
void cnv8_16(uint8_t *from, uint16_t *to);
void cnv8_16LE(uint8_t *from, uint16_t *to);
void cnvF_8(const float from, uint8_t *to);
void cnv8_F(uint8_t *from, float *to);
void cnvD_8(const double from, uint8_t *to);
void cnv8_D(uint8_t *from, double *to);
Test service module
The implementation of the test service module is very simple, making the perfect candidate for a more through code examination. When a telecommand is received with (17,1) it replies with a telemetry packet of (17,2) with no data.
The test-app function serves as an entry point for the packet in the route. Most of the function’s code has to do with checks. The test-crt-pkt is a complimentary function
Listing 4.16 Test service module functions
SAT_returnState test_app(tc_tm_pkt *pkt) {
tc_tm_pkt *temp_pkt = 0;
if(!C_ASSERT(pkt != NULL && pkt->data != NULL) == true) { return SATR_ERROR; }
if(!C_ASSERT(pkt->ser_subtype == TC_CT_PERFORM_TEST) == true) { return SATR_ERROR; }
test_crt_pkt(&temp_pkt, pkt->dest_id);
if(!C_ASSERT(temp_pkt != NULL) == true) { return SATR_ERROR; }
route_pkt(temp_pkt);
return SATR_OK;
}
SAT_returnState test_crt_pkt(tc_tm_pkt **pkt, TC_TM_app_id dest_id) {
*pkt = get_pkt(PKT_NORMAL);
if(!C_ASSERT(*pkt != NULL) == true) { return SATR_ERROR; }
crt_pkt(*pkt, SYSTEM_APP_ID, TM, TC_ACK_NO, TC_TEST_SERVICE, TM_CT_REPORT_TEST, dest_id);
(*pkt)->len = 0;
return SATR_OK;
}
Telecommand verification service module
The telecommand verification service allows to see the outcome of a telecommand operation. If the operation is critical or the operator wants confirmation the acknowledgement flags are set in the packet header.
The implementation in order to be simple and efficient was straightforward. The verification state was added in the packet structure. There each service is responsible to place the state of the operation. During the packet’s allocation from the packet pool the state is set to initialized, in order to differentiate from other states.
After the processing of the telecommand is finished, the verification-app is called. It checks the acknowledgment flags in the telecommand frame and if a verification flag exists, it sends the corresponding telemetry packet. If the verification state in the telecommand flag indicates a failure, the verification state is used for the failure reason.
Using the verification service a TCP like mechanism, that insures the delivery of critical packets could had been created if there was enough time available.
Moreover, the use of the verification state could be used to store more information for the status of the packet. The use of preprocessor macros that automatically add an error or a general state in the process could simplify the development.
During the implementation, the first design of export packet made the inline processing of the verification and the implementation of extra stages impossible without adding overhead that could interrupt the primary process. With the later addition of queues the design could have been simpler. One different design would have a table with all packets needing verification and the verification service module residing in a different or in the idle task, checking for a change in the state. That way more verification states could have been used.
The implementation follows more or less the same scheme as the test service module.
Event reporting service module
Table 4.3 Event service frame
Subsystem ID Event ID Event time Data ————– ———- ———— ——— 8 bits 8 bits 32 bits 32 bits
The event report service was originally designed to be used but time didn’t allow for full implementing and testing so eventually wasn’t used.
Since the only storage medium is on the OBC, there wasn’t a way to store event logs in other subsystems. For that reason, it was decided that all events are to be sent to the OBC for storage. There is always the issue that some events won’t be stored for various reasons like power resets or packet loss but it is better to have more information and lose some than the opposite. An implication of using the OBC for event storage is that only the most critical events are send in order not to create too much traffic for the OBC to handle.
At first the UART was used for displaying debug messages. After the subsystems integration and since only ECSS packets could be forwarded to the umbilical UART, the debug messages were encapsulated in event service packets. The ASCII messages were used only for early debugging and there were replaced later.
The next design had a fixed packet format. For the implementation, each event had it’s own function and the subsystem’s developer was responsible for defining the subsystem’s events.
For design simplicity, the event-app had a preprocessor ifdef that checked the subsystem and if it was the OBC, it stored the event, in all subsystems it forwarded the packet to the OBC.
Listing 4.17 Event service module boot event example function
SAT_returnState event_boot(const uint8_t reset_source, const uint32_t boot_counter) {
tc_tm_pkt *temp_pkt = 0;
if(event_crt_pkt(&temp_pkt, EV_sys_boot) != SATR_OK) { return SATR_ERROR; }
temp_pkt->data[10] = reset_source;
cnv32_8(boot_counter, &(temp_pkt->data[11]));
for(uint8_t i = 15; i < EV_DATA_SIZE; i++) { temp_pkt->data[i] = 0; }
if(SYSTEM_APP_ID == OBC_APP_ID) {
event_log(temp_pkt->data, EV_DATA_SIZE);
} else {
route_pkt(temp_pkt);
}
return SATR_OK;
}
Listing 4.18 Event service module COMMS debug message function
#define LOG_UART_DBG(huart, M, …) \
| if(dbg_msg == 1 | dbg_msg == 2) { \ |
snprintf(_log_uart_buffer, COMMS_UART_BUF_LEN, \
”[DEBUG] \%s:\%d: “ M “\n”, \
__FILE__, __LINE__, ##__VA_ARGS__); \
event_dbg_api (_ecss_dbg_buffer, _log_uart_buffer, \
&_ecss_dbg_buffer_len); \
HAL_uart_tx (DBG_APP_ID, _ecss_dbg_buffer, _ecss_dbg_buffer_len); }
Housekeeping & diagnostic data reporting service module
The most common task for a cubesat is housekeeping: in regular intervals data from each subsystem is gathered, stored and transmitted to earth. The data provide an insight to the state of the cubesat. For UPSat there are 2 housekeeping functions, WOD and extended WOD.
The mechanism for WOD formation is that the OBC sends a telecommand request in each subsystem with the structure ID, the subsystems respond with the data, the OBC gathers all the data, stores it and forwards it to the COMMS subsystem, in order to transmit them to Earth. Each structure ID and application ID form a unique set of data.
There are 2 distinct functions of the housekeeping service:
-
Requesting and retrieving data.
-
Storing housekeeping data (OBC).
Since each subsystem has its own set of data related to different structure IDs, the housekeeping service calls the subsystem dependent functions that are in the platform folder. The functions in the module are used only for checking input parameters and calling the functions in the platform folder.
OBC Housekeeping
OBC sends the WOD and extended WOD in 1 minute interval. First it sends the requests to EPS and COMMS with 1 second delay between them and with the health report structure ID. When a response arrives, the data are temporary stored in memory. If a response doesn’t come the respective data are left with 0 value. A mechanism for re-requesting the data wasn’t implemented. After 29 seconds OBC forms the WOD report with the responses from the subsystems, stores it and it sends it to COMMS for transmission. After the WOD comes the extended WOD. The same mechanism is used, only this time requests are send to all 3 subsystems and the structure ID is extended health.
Since the WOD requires 31 historic values resulting in data logged 31 minutes ago, the persistent RAM region of the OBC was used. The SRAM was used instead of the SD card because it minimizes the data access time and improves reliability since the delete function of the FatFS is not invoked. For storage, a circular buffer was implemented in the SRAM containing 32 sets of values.
Function management service module
Each subsystem has its own set of control variables related to different function and device IDs, the service calls the subsystem dependent functions that are in the platform folder. The functions in the module are used only for checking input parameters and calling the functions in the platform folder.
There are 4 function IDs used to turn on, off and reset devices. The 4th set values in subsystem parameters. At first the service was designed for controlling power in devices and subsystems thus the functions and files were named power control. The service was later expanded in setting parameters and the naming scheme should had changed but there wasn’t enough time.
In the above listing the OBC platform function that controls the SD card’s power is taken as example. First in the assertions the input parameters are checked for correct values and after that depending on the action, the respectively HAL function that perform the actual action is called.
Listing 4.19 Function management service module OBC SD card power control example
SAT_returnState power_control_api(FM_dev_id did, FM_fun_id fid, uint8_t *state) {
if(!C_ASSERT(did == OBC_SD_DEV_ID) == true) { return SATR_ERROR; }
| if(!C_ASSERT(fid == P_OFF | fid == P_ON | fid == P_RESET) == true) { return SATR_ERROR; } |
if(did == OBC_SD_DEV_ID && fid == P_ON) { HAL_obc_SD_ON(); }
else if(did == OBC_SD_DEV_ID && fid == P_OFF) { HAL_obc_SD_OFF(); }
return SATR_OK;
}
Time management service module
I was partial involved in the design and implementation of this service therefore I will only discuss the parts I was involved.
OBC and later the ADCS use the internal RTC peripheral for timekeeping. The OBC has the timekeeping of UPSat and has a coin battery that preserves the timekeeping when the power is down. ADCS uses it for the position calculation and in every reset, it requests the time from the OBC. The QB50 specifications define the QB50 epoch which is the seconds from 2000.
The service provides a set of functions that get and set the time in the RTC of the ADCS and OBC. Moreover, it has functions that manipulate the QB50 epoch and the UTC time format. The QB50 to UTC conversion function wasn’t implemented because it wasn’t used.
The implementation used lookup tables with precalculated values for UTC to QB50 epoch conversion. The tables are stored in flash memory which the OBC and ADCS has a lot available in contrast with RAM. The algorithms used for calculating the similar UNIX epoch were examined but the conclusion was that they were not suited for microcontrollers with limited resources. Having a single table would require too much space so they were separated in to 3 arrays: the first is a 2D array with the year and month, a 1D array for the 31 days and finally an array holding the 23 hours. In order to find the epoch all 3 arrays are summed along with the seconds. The lookup tables were automatically created from a python script.
Listing 4.20 Python code generation script for populating the C look up arrays
import datetime
import sys
tsecs = [0 for x in range(32)]
print “const uint32_t cnv_QB50_YM[MAX_YEAR][13] = { { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 },”
for yr in range(1, 21):
for mt in range(1, 13):
t = datetime.datetime(2000 + yr,mt,1)
secs = (t-datetime.datetime(2000,1,1)).total_seconds()
tsecs[mt] = secs
print “ { 0, \%d, \%d, \%d, \%d, \%d, \%d, \%d, \%d, \%d, \%d, \%d, \%d },” \% (tsecs[1], tsecs[2], tsecs[3], tsecs[4], tsecs[5], tsecs[6], tsecs[7], tsecs[8], tsecs[9], tsecs[10], tsecs[11], tsecs[12])
print “ }”
print “const uint32_t cnv_QB50_D[32] = { 0,”
for d in range(1, 32):
print “ %d,” % (d*24*60*60)
print “ }”
print “const uint32_t cnv_QB50_H[25] = { 0,”
for d in range(1, 25):
print “ \%d,” \% (d*60*60)
print “ }”
Large data transfer service module
Large data transfer is used when the data payload uses an extended packet and it’s transmitted through RF. The maximum data size that could be used with RF in COMMS without data loss was defined by the COMMS team to 210 bytes. The maximum size of a SU script is defined by QB50 to 2k bytes. Large data transfer services is only used in mass storage service interactions.
There are 2 distinct functions of the service:
-
Uplink.
-
Downlink.
Uplink is used for transferring files to UPSat from the ground station. This is used only for SU script upload.
Downlink is used for getting logs that reside in the SD card.
Only one operation is allowed at a time. If a new operation tries to start while another one takes place, it will result in error.
Listing 4.21 Large data transfer service entry function
SAT_returnState large_data_app(tc_tm_pkt *pkt) {
if(pkt->ser_type == TC_LARGE_DATA_SERVICE && pkt->ser_subtype == TC_LD_FIRST_UPLINK) { large_data_firstRx_api(pkt); }
else if(pkt->ser_type == TC_LARGE_DATA_SERVICE && pkt->ser_subtype == TC_LD_INT_UPLINK) { large_data_intRx_api(pkt); }
else if(pkt->ser_type == TC_LARGE_DATA_SERVICE && pkt->ser_subtype == TC_LD_LAST_UPLINK) { large_data_lastRx_api(pkt); }
else if(pkt->ser_type == TC_LARGE_DATA_SERVICE && pkt->ser_subtype == TC_LD_ABORT_SE_UPLINK) { large_data_abort_api(pkt); }
else if(pkt->ser_type == TC_LARGE_DATA_SERVICE && pkt->ser_subtype == TC_LD_ACK_DOWNLINK) { large_data_ackTx_api(pkt); }
else if(pkt->ser_type == TC_LARGE_DATA_SERVICE && pkt->ser_subtype == TC_LD_REPEAT_DOWNLINK) { large_data_retryTx_api(pkt); }
else if(pkt->ser_type == TC_LARGE_DATA_SERVICE && pkt->ser_subtype == TC_LD_ABORT_RE_DOWNLINK) { large_data_abort_api(pkt); }
else {
return SATR_ERROR;
}
return SATR_OK;
}
Listing 4.22 Large data transfer service, structure with all necessary information
struct _ld_status {
LD_states state; /**< Service state machine, state variable*/
TC_TM_app_id app_id; /**< Destination app id */
uint8_t ld_num; /**< Sequence number of last fragmented packet stored */
uint32_t timeout; /**< Time of last large data action */
uint32_t started; /**< Time that the large data transfer started */
uint8_t buf[MAX_PKT_EXT_DATA]; /**< Buffer that holds the sequential fragmented packets */
uint16_t rx_size; /**< The number of bytes stored already in the buffer */
uint8_t rx_lid; /**/
uint8_t tx_lid; /**/
uint8_t tx_pkt; /**/
uint16_t tx_size; /**/
};
Table 4.4 Large data transfer service, different states of the Large data state machine
Large data state State number Description ———————– ————– —————————————————————————————————- LD-STATE-FREE 1 No large data activity LD-STATE-RECEIVING 2 The service receives data LD-STATE-TRANSMITING 3 The service transmits data LD-STATE-TRANSMIT-FIN 4 The large data TX finished. The engine just waits for possible lost frame requests from the ground LD-STATE-RECV-OK 5 The service successfully received the last frame
Mass storage service module
The mass storage service was the most difficult and complex module in UPSat. It has the most lines of code and functions in services. Even though most modules didn’t have the quality of design I wanted, due to time constraints, in most parts it was more than ok, except the mass storage module. Even though the service module works fine in terms of reliability and efficiency, if I had the chance, I would definitely major refactor it.
There are 2 main reasons that shaped the design of the module: the restraints of data sizes send through the RF channel and the limitations from the design and documentation of the FatFS library and the FAT file system specification.
The mass storage module underwent 3 design iterations. The first one changed due to highly coupling with the large data transfer module and the second had issues with the data processing through the RF channel. The 3rd design iteration is used in UPSat.
The module breaks the coding standard used in the services of not directly calling library functions but there were significant time constraints, plus the design was tightly coupled with the FatFS library and UPSat specific constraints so it would be difficult to make it abstract enough to be reused.
The specification for the mass storage service defines packet stores that areas of storage for same group types.
There are 3 general types of storage in UPSat:
-
Logs.
-
Configuration files.
-
Unique large files.
Logs come from various sources like housekeeping and events. There are implemented as a circular buffer so in the case of a overflow the newest log overwrites the oldest one. The logs are stored for downloading when there is link with the ground station. After the logs are downloaded they should be deleted so in the next link, the operator doesn’t re download them. Configuration files are files that are unique and they store values for parameters. Large unique files are the files that are larger than the normal data size used in mass storage and unique, e.g. photos from the IAC or SU scripts.
In UPSat there are 7 specific types:
-
SU logs.
-
Event logs.
-
WOD logs.
-
Extended WOD logs.
-
7 SU scripts.
-
IAC photos.
-
Scheduling service configuration files.
It was decided that each type should have its own store ID and stores should be implemented with folders. Each store has different set of properties.
The 7 SU scripts reside in 7 different and dedicated store IDs and respectively folders. Each script is unique and the only file in the folder. For security reasons the SU folder must be empty before a new script can be uploaded. The maximum size of each script is 2k bytes.
There are logs from the SU, event service and from housekeeping service the normal and extended WOD. The logs share the same properties:
-
Fixed size of records.
-
Implemented as circular buffers.
-
Unique data in entries.
-
No need for modification after the log entry.
-
Able to search, download and deleted.
Each log is implemented as a separate file. This happens mainly due to the FatFS and its limitations. The Filenames are implemented as numbers only, stored in ASCII number characters. With the addition of folders, it gives unique log entries. Numbers are used because it is easier and more efficient for processing them in the microcontroller than ASCII strings. e.g. the log 4916 occupies only 2 bytes in RAM as an integer in contrast of using 5 bytes as an ASCII string. Again, with integers file comparisons are a lot faster than as strings.
There was a though of using timestamps as the filenames of logs. The timestamp would had been the time of the log creation. The unique file name would have been achieved by using the correct time resolution. The reason that it wasn’t used was that with 1 millisecond resolution and 8 characters for the timestamp, the timer would rollover in ~51 days, which was way lower than the mission specifications. When the timer rolled over the result would had been to have logs that would be impossible to figure if they were created before or after the roll over. Moreover, it was difficult to guarantee that all the times the OBC would had correct time.
The circular buffer mechanism was used because of the nature of the log operations. First of all, having the circular buffer ensures that the logs won’t overrun and fill all the SD card. Moreover, since communication with the ground is limited, makes the downlink of a very large log number impossible.
Note on mass storage and large data services
In the first design of the mass storage and large data transfer services, the modules were highly coupled. This happened because the large data transfer service is only used for mass storage service operations. That gave the advantage that the number of frames and data payload size aren’t limited to the size of the extended packet.
When a new request for downlink happens in mass storage, the module called the large data transfer function and started the operation. When the next operation happened (next frame, retransmission of the frame) the large data accessed the mass storage module in order to fetch the data. Moreover, it needed to have information related to the mass storage (files, store ID etc).
The result of this designs was ugly code that was difficult to understand, test and modify. Also, the design violated the JPL’s rule about software modularization.
For that reasons the design was abandoned, the services were uncoupled and the large data transfer service module used dedicated buffers in memory that store the packet until the transaction finishes. That limits the maximum transfer to 2k bytes but the design and the implementation was drastically simplified. Also, it felt that this implementation was more suitable and more to the original intentions of the specification’s designers.
2nd design
Each log associated with a store ID has a counter that holds the number of the next log filename. Every time a new log is about to be written, the number that is going to be used as a filename is requested from the get-new-fileId function. The function returns the number and updates the counter. If the counter reaches the log limit, it rolls back to 1. In the case something happens and the log is not stored, the log counter is not rolled back and the log is left empty. If the log has a past log entry, it indicates that there was an error during the store.
All logs internally have unique timestamps: QB50 epoch in the case of WOD and SU logs, multiple timestamps in the case of extended WOD and boot time in log events.
3rd design
After the 2nd version finished and testing started, a major issue became obvious. The usual sequence of actions for the ground station operator regarding the mass storage would be to a) get a list of logs written to the SD card b) downlink the wanted logs c) delete the logs that were successful downloaded.
Retrieving the logs requires to have the filename, which is taken along with other information from the logs list. The issue was that retrieving the logs list would require a large portion of the earth to UPSat link time. Especially if there is a large number of logs, the logs list operation could even consume all the link.
For that reason, it was decided that the design was unacceptable.
The 3rd and final version used the previous design and added a layer of functionality on top.
A head and tail pointer were added for each store ID. The head pointer holds the filename to the newest log and the tail holds the filename to oldest. It is assumed that the log filenames are continuous between head and tail. Deleting can only happen by removing logs from the tail and towards the head. The files are not actual deleted from the file system, only the pointer is moved. This has the advantage of not using the delete function of the FatFS which could lead to file system corruption. If the buffer is full and the head reaches the tail, the oldest log is removed by adding 1 to the tail, the head is increased by 1 and the oldest log is overwritten with the new log entry.
With the new design, the log report is easier, only the number of files is needed for each log store. By using the head and tail pointers, the filenames become abstract. When the user asks for the first log file (oldest), that is translated to the filename that the tail pointer holds. The next log is found by simply adding 1 to the tail pointer and so on until it reaches the head pointer which holds the newest log entry. That way the issue of needing the filename from the file list is resolved.
SatNOGS client command and control module
The SatNOGS client command and control module was added in order to send and receive ECSS packets containing telecommands and telemetry from UPSat. The backend is in python while the front end in JavaScript, HTML and CSS.
The operator in the UI selects the action from the various categories and if it is needed, fills the necessary information and sends the telecommand. The telecommand is send through an UART or RF depending the user’s selection. JavaScript takes the users selections and accordingly formulates the telecommand packet which is send to the python backend for transmission through web sockets. When a telemetry packet is received, the python takes the packet and depending the subsystem, service type, subtype and any other information containing, a text response is formed that is forwarded to the UI. A text response is used instead of the packet information because it is easier for a human to understand it.
I was involved in the development and testing of the module. My main contributions were in the front end, regarding the operator’s actions and the packet creation according to the selections. In the back end the function handled telemetry packets and extracted the logic into text.
Life of a packet
After the analysis of each part it is imperative to give the reader an overview of the work flow, the best way is by describing the life of an incoming packet.
There are 4 steps for processing a incoming packet:
I. First the packet is received byte per byte from the UART ISR. If the packet is encapsulated in a valid HLDLC frame, the packet is stored from the ISR to a temporary buffer.
II. When the import function is called or in the case of the OBC the task is signaled from the ISR, the packet goes through the HLDLC deframe, a new packet is allocated from the packet pool and then the ecss-unpack gets the packet from the array, performs all necessary checks and places it in the packet structure. If the unpack receives a valid packet then the route function is called. If there was a failure the verification service is called. Finally, if the packet was destined for that subsystem the packet’s state returns to free and it is available for reuse from the packet pool.
III. Route directs the packet to the correct service or the correct queue if the packet is indented for another subsystem. It is highly probable that the service used, generates a response, then the route is called again and the packet is placed in the correct queue for transmission. If there was an error in the route the packet is freed and the function returns the error.
IV. The verification module checks if the incoming packet needed an acknowledgement and if that’s the case, if the packet has all the necessary information the response is routed back.
The life of an outgoing packet is a lot simpler. The export function checks the queue for packet, if the UART is available, the packet is popped from the queue, it is packed to an 8-bit array from the packet structure, then is encapsulated in a HLDLC frame and finally is transmitted.

Figure 4.3 The life of a packet
On-board computer
In this section, the software implementation for the OBC will be discussed.
Discovery kit
At first, development was done using the STM32F4 discovery kit while waiting for the OBC and ADCS PCBs. They included implementing software for familiarizing ourselves with the development ecosystem: cubeMX libraries, FatFS, FreeRTOS and various sensors and peripheral connection and tests for correct operation. For the sensors and the SD card a custom prototype board was created in order to connect the peripherals to the discovery kit.
After the PCBs were ready for testing the code was ported for the PCBs. The main difference being the crystal oscillator used, 12MHz for the discovery kit and 8MHz for the PCBs.
FreeRTOS

Figure 4.4 On-board computer software diagram
The most important configuration is the use of preemption for the scheduler, the memory management scheme set to heap 1, the use of stack overflow checks at first for debugging and then for fault containment.
Queues are created for storing pointers of outgoing packet. The 4 queues are named after the subsystems that store packets for: queueCOMMS, queueADCS, queueDBG and queueEPS.
There are 5 tasks:
-
UART task.
-
Scheduling task.
-
SU task.
-
Housekeeping task.
-
Idle task.
First with the highest priority is the UART task. It handles incoming and outgoing packets. This task has the highest priority since the first hard real-time requirement is to handle as soon as possible incoming packets so there aren’t any packet losses.
The task checks for new packets and process them. If there isn’t any new outgoing packet waiting in the queues, the task has a delay for 10 seconds. If there are packets in the queue the task sleeps for 100 milliseconds which is plenty of time for the previous packet to finish transmitting. In the case of an incoming packet, the task is notified from the UART ISR and wakes up.
Moreover, the UART task is responsible for all initializations in the OBC and it is imperative for all the other tasks to wait before all initializations are finished or otherwise it is possible to have hard faults.
There is a 5 second delay during boot. The delay happens before SystemCallConfig() but after HAL-init() so the clocks are not configured and power consumption is optimal ( 5mAh versus 50mAh). The cause for the delay is that the EPS in each reset opens all subsystems for a few milliseconds by hardware design. It was designed that way if there is an issue with the EPS microcontroller the other subsystems will continue working. The delay ensures that there isn’t any operation performed by the subsystems and power consumption is limited before EPS finds the state of the batteries and decides which subsystems will remain open or they must close. There are 2 reasons for closing the subsystems: UPSat is in the 30-minute launch sequence so all subsystems must remain closed and finally battery has low power so subsystems should remain closed for power conservation.
The housekeeping task handles all the housekeeping activities. First the housekeeping service module initialization is called which sets the buffer that is allocated for the reserved outgoing housekeeping packet. Then the task calls continuously the hk-sch function which sends housekeeping requests to the subsystems that form the normal and extended WOD. After each packet request is put in the queues, the UART task is notified and switched in order to send the requests. Since the operations are not that time critical, it was given the lowest priority before the idle task.
The SU and scheduling task are below the serial task an above the housekeeping. I wasn’t involved in the design and the implementation.
The idle task is the task with the lowest priority and has all the functions that are not time critical:
-
Check the sanity of the packet pool.
-
Check the sanity of the queues.
-
Start and get the results of the A/D converter that is connected to the OBC battery.
There is a delay of 1 second at the end of the while loop. This happens in order the idle task doesn’t run the checks all the time.
In the idle task, it was thought to run BIT techniques, the event buffer writes to the SD and memory scrubbing. Unfortunately, there wasn’t enough time to implement them. Also, it should have been implemented sleep of the microcontroller core for reducing the power consumption. FreeRTOS requires to have an idle task with the lowest priority.
Real time clock
The OBC has a coin li-on battery that supplies the RTC peripheral and 4kbytes of the SRAM when the main power is off. The RTC is part of the STM43F4 microcontroller but runs independently.
The RTC peripheral is used for storing the time without the need for the microcontroller running. It has a time drift that is larger than what the mission profile requires. For that reason, the time needs to be regular updated either from the ground station or from the GPS in the ADCS subsystem. Using the RTC simplifies the design. the other options would be to have the on-board GPS running continuously or to power up every time the OBC is reset.
The battery also powers a 4K bytes portion of the SRAM. This part stores configuration parameters of the OBC. Having the battery, the data remain after a reset.
This data is not stored in the SD or the flash memory because storing the data would take more time, that could lead to normal operation interaction. Moreover, continuous writing of the data could lead to file system corruption.
The event buffer was intended to be temporary stored in this portion of the memory and write the events in the SD when there was enough data, during the idle time of the CPU.
FatFS
FatFS is configured to have dynamic timestamps every time a file is modified. FatFS has the get-fattime function that returns the current timestamp. The implementation that is the application specific takes the time from the RTC and compress it according to the FatFS specification so that it if in 32 bits. Using that the user can have information om the time that a file is modified. This is used in the mass storage report. The RTC time is taken by accessing the get-time-UTC HAL function.
The most important part of the config is the use of MKFS for formatting the SD in the case there is a problem with the file system, the use of short filenames, the default size of 512 bytes sector size and the FS-LOCK set as 1, the number of files opened is restricted to 1.
Generic
Besides the various peripheral configurations, the most important was the clock settings in the clock configuration and in RCC, the SYS setup for SWD and ADC channel 1 for Vbat.
Listing 4.23 FatFS get-fattime function implementation
DWORD get_fattime(void)
{
struct time_utc tmp;
get_time_UTC(&tmp);
| return (((tmp.year + 20) << 25) | \ |
| ((tmp.month) << 21) | \ |
| ((tmp.day) << 16) | \ |
| ((tmp.hour) << 11) | \ |
| ((tmp.min) << 5) | \ |
((tmp.sec) >> 1));
}
Testing
In this chapter, the testing campaign is going to be described, along with the results and issues that were found.
OBC/ADCS PCB tests
The first task was to test the existing OBC PCB and look for design issues.
For the I^2^C and SPI connected devices, the test was to get the device signature. Most devices have a SFR that contains a signature specified from the manufacturer.
If the SFR is read and it has the correct signature, it is safe to say that the device and the device’s connection to the microcontroller works fine. Even though the device signature tests, show that a device works in a first level, more tests are needed, in order to conclude the device correct operation e.g. if the sensors output are correct.
The UARTs were tested, using an USB to UARTs converter connected to a computer and by checking if the data received are same as the one sends and vice versa.
SD was checked by writing files and verifying the files on the SD from a computer.
Also, the correct crystal and PLL parameters were tested by connecting a GPIO to an oscilloscope and having it toggle at specific timings. If the timing in the software and in the oscilloscope matched then the parameters were fine.
To test some functionality before having the actual PCBs, some handmade prototypes were made.
After the OBC-ADCS schism, the same code was ported, in order to test the new boards.


Image 5.1 OBC prototype board Image 5.2 COMMS power amplifier testing
COMMS testing
After the COMMS PCB was designed and manufactured, there was a need for testing, in order to verify that the board was functioning properly.
At first the datasheet and example code for MSP430 were examined. A discovery kit was connected to a CC1120 [15] developers kit node, while the other node was connected to a laptop. After a lot of experimentation and more careful examination of the example codes, the correct parameters for the CC1120 were found. After the successfully communication using the developer’s kits, the actual PCB was tested, with the same results.

Figure 5.1 ADCS IMU communication debugging in a logic analyzer
Listing 5.1 Unit test for HLDLC
#include <stdio.h>
#include “../hldlc.h”
#define TEST_ARRAY 20
int main() {
uint8_t in[TEST_ARRAY], out[TEST_ARRAY*2], res[TEST_ARRAY*2];
uint16_t cnt_in, cnt_out, size, res_size;
uint8_t c;
printf(“Starting Unit tests\n”);
for(int i = 0; i < 10; i++ ) {
in[i] = i + 0x12;
}
res[0] = 0x7E;
res[11] = 0x7E;
for(int i = 1; i < 11; i++ ) {
res[i] = i + 0x12;
}
cnt_in = 0;
cnt_out = 0;
size = 10;
res_size = 12;
uint8_t check;
printf(“%d\n”, in[0]);
do {
check = HLDLC_frame( &c, in, &cnt_in, size);
out[cnt_out++] = c;
} while( check != SATR_EOT);
for(int i = 0; i < res_size; i++ ) {
if( out[i] == res[i] ) {
continue;
} else {
printf(“error\n”);
break;
}
}
return 0;
}
Unit testing
During the start of the CnC service development, it became apparent that there was a need for testing the code without having the whole design implemented yet.
The first tests were made by writing test programs that used the modules functions and by simply including the modules, using t some functions were quickly tested. Using that testing strategy some functions were quickly tested. Soon that design came to its limitations. There was a need to simulate functions on the same module in order to make more elaborate tests.
Two unit testing frameworks, for C programming language were found:
-
Cmocka.
-
Unity.
Cmocka [28] was the first framework that was found and it initially become the first choice. With more careful examination, the framework has limitations that affected the correct testing of the modules.
Unity [14] on the other hand, was more suitable for the module design.
Unfortunately, due to time constraints, only one unit test was used from unity framework. That test though unveiled some bugs in the code.
Static analysis
There was an effort to perform static analysis on the OBC and the command \& control, unfortunately the various frameworks that were used had issues with ST’s cubeMX code. The eclipse’s static analyzer was used and it uncovered some errors.
Command and control testing software
After the services implementation became more mature and there was a prototype with limited functionality, there was a need for a software to send TC/TM commands, simulating the ground station software, which wasn’t ready at that time.
The first attempt was a quick python script. It was used for testing the test and function management service. The discovery kit run a testing version of the FM module, that was connected with a led. Sending on/off commands turned the led on/off.
The python script used a serial communication and simply send a predefined array. That array had a pre-calculated ECSS packet, encapsulated in a HLDLC frame. Depending on the command that was wanted to be send, the user had to uncomment that array and comment the others. After the script send the array through the UART, it simply read character from the UART, until the user terminated the program. It was up to the user to decode the returned strings and to understand if the response was correct.
Packetcraft [1] was the second attempt, it was written in Ruby, had a CLI that allowed a user to send command of his choice. The commands were implemented in YAML scripts, the user had to fill the data by hand. ECSS and HLDLC packets were made by the packetcraft. More over response packets was displayed in multiple formats that allowed the user to identify the data (ascii, hexadecimal and decimal). In the latest versions, it even allowed to add dynamic data in the packet e.g. the current time. Using packetcraft allowed to further test the services but after a while, it reached its limitations. The need to dynamic create packets, the CLI was full after 50-60 commands, plus that it was written in ruby.

Figure 5.2 Packetcraft
Listing 5.2 Python test script
import serial
import array
import time
port = serial.Serial(“/dev/tty.usbserial”, baudrate=9600, timeout=1.0)
t = array.array(‘B’, [126,24,1,192,185,0,5,16,17,1,6,0,99,126]).tostring() #test service
t = array.array(‘B’, [126,24,1,192,185,0,10,16,8,1,6,1,0,0,0,8,0,124,126]).tostring() #led on
#t = array.array(‘B’, [126,24,1,192,185,0,10,16,8,1,6,0,0,0,0,8,0,125,93,126]).tostring() #led off
port.write(t)
while True:
rcv = port.read(30)
print rcv.encode(‘hex’)
print rcv
time.sleep(0.1)
SatNOGS client, command and control module
SatNOGS client was intended to be used as the default command and control software from the beginning. Due to the time pressure, it was left to be built after the completion of UPSat since there will be more available time then. But as soon as the limitations of packetcraft were reached, it was clear that the command and control part of the client needed to happen as soon as possible.
The backend is in python, UI with HTML, CSS and JavaScript. The service utilities unpack, pack function was ported from C to python. The packet format was dynamic created from the UI and is send to the backend to be encapsulated in a ECSS services packet and then in a HLDLC frame, in the case the packet was using the UART. The development of the CnC part of the SatNOGS gave a further push to the testing. The user could send commands dynamic formed from the UI and see the response as a text processed from the client. Finally, the used of storing logs gave the opportunity to left UPSat several days working and then examine the logs for incorrect behavior.


Figure 5.3 UPSat command and control Image 5.3 UPSat stack prototype boards
Debug tools, techniques
In this section, the techniques and the tools that was used are discussed.
Listing 5.3 UART debugging macro used in the ADCS subsystem.
#if ADCS_UART_DBG_EN
#define LOG_UART_DBG(huart, M, …) \
snprintf(_log_uart_buffer, ADCS_UART_BUF_LEN, \
”[DEBUG] %s:%d: “ M , \
__FILE__, __LINE__, ##__VA_ARGS__); \
HAL_UART_Transmit (huart, _log_uart_buffer, \
strlen (_log_uart_buffer), UART_DBG_TIMEOUT); \
UART
First, the simplest technique is the use of an UART to output debug messages. The main advantage is the simplicity of the technique, UART was the first peripheral used in the microcontroller of the subsystem. After the integration of all subsystems and the use of 1 UART in the umbilical, for debugging and CnC, the debug messages couldn’t to be forwarded due to non HLDLC frames drop. For that reason, an event service packet was used to encapsulate the debug message and forward it to the ground station. The debug messages had to be in ASCII format. Moreover, since the debug messages could flood the ground station with traffic leaving the user unable to view the messages and send commands, for that reason a new device id was created so that it could control the flow using the function management service. The main use of the UART debug is to have quick debug messages, raw data from the GPS, before the CnC part of the client was ready. The limitation of that technique is that the UART is slow compare to microcontroller timings. If a block write operation is used, it takes critical milliseconds front the system, thus affecting the system behavior.
ST link and SWD
The STM32 Discovery kit has on-board a Serial Wire Debug (SWD) interface, that can be used with internal or external targets. Using SWD we can perform debugging in real time. SWD is mainly used with breakpoints, A breakpoint is associated with a line of code, when that line is about to be used, the program stops in real time. That way an inspection of the state of the subsystem can be performed, by viewing the value of variables etc. In the case of an error, there is the possibility to perform step by step instruction examination, so the source of the error can be traced.
Using assertions combined with a breakpoint in the calling function, allowed us to have the system running for a long duration and halt only when there a was an error. Having a single function called on all errors allowed not to waste breakpoints in multiple locations and not to add manually breakpoints in every point of error handling.
As was mentioned earlier, the event service was used for debugging, an event packet could carry debug messages and significant events like subsystem reboot.


Image 5.4 The on-board ST-link connected to the stack Figure 5.4 Example use of a breakpoint
Segger J-Link
The ST-link found on-board the discovery kit has some limitations that hinder the testing process e.g. the number of breakpoints is limited to 8.
Segger’s J-Link not only overcomes these limitations with unlimited breakpoints but also offer some extra functionality like Real Time Transfer (RTT) that the systemview uses to interact with the microcontroller.
Moreover, Segger provides an ecosystem with free software like systemview and J-scope that are invaluable during testing.

Image 5.5 J-links connected to UPSat for debugging
Segger systemview
Finally, even though the above techniques worked fine, they didn’t allow to have a continuous view of the system without addicting it. The UART and event packet, generated traffic that was hindering with the normal operation of the system and SWD need to pause the system in order to view its state. A way was needed to test the system using techniques that had minimal effect. That way was found in Seggers systemview. In addition, systemview had native support for FreeRTOS.
In order to use systemview with freeRTOS analytics in OBC, the systemview headers had to be included in FreeRTOS files. For better examination of the results the ISR names were manually added in systemview configuration file. Finally, the sysview module files were added in repository in the core folder.
Listing 5.4 ISR naming in systemview
SEGGER_SYSVIEW_SendSysDesc(“I#15=SysTick,I#53=EPS_U1,I#54=SU_U2,I#55=UMB_U3,I#65=SDIO,I#67=IAC_SPI3,I#68=COMMS_U4,I#87=ADCS_U6,I#86=EPS_DMA,I#33=SU_DMA,I#30=UMB_DMA,I#31=COMMS_DMA,I#70=ADCS_DMA”);
The SYSVIEW definition enables the sysview module. All subsystems must include the sysview functions. If the sysview functionality is disable, all the definitions and functions remain empty. This happens because sysview events are called in different ECSS modules. If the module is enabled sysview defines the structures needed for systemview to register and display new events. Trace definitions are called from other modules, systemview modules form from structures that have specific ids for that events, the type of the event parameter, plus a description for that event. Using different structures for events helps to group them. All subsystems should initialize all modules, even if they don’t use them.
If the subsystem doesn’t have RTOS, there is a bare metal configuration. Besides the sysview module, for systemview to work, the subsystems need to include the systemview source files. The code and configuration are taken from Segger website [10].

Figure 5.5 Systemview events display
RTOS and services timing analysis
After most of the modules were implemented and adequate tested, there was the need to make the timing profile of the services, to evaluate the RTOS behavior and check if the real-time constraints were met.
There were 3 main concerns about the systems behavior:
-
If the timing of the tasks were quick enough, for the next packet to be processed in time.
-
The duration of mass storage services operations. SD memory are general a lot slower than onboard flash operations
-
If the FreeRTOS scheduler would handle the task switch in time so that wouldn’t hinder operation.
Python script
The first set of tests were performed, in order to identify packet loss and get a sense of the systems process times. The concept was to send continuous test packets and measure how many responses were lost.
The first attempt was made with a python script running in a PC. No packet losses were detected but the script couldn’t stress the OBC enough. The script needed a 1ms delay between each packet or else the script stopped functioning.
Arduino stress test
In order to stress test the OBC, an Arduino Due was used. A program was made, that was sending repeatable test service packets to all 4 UARTs of the OBC, simulating the OBC’s connections (ADCS, COMMS, EPS, umbilical). The program compared the packets send with the responses received and calculated the packet loss. The Arduino Due was used, due to the 3.3v of the pins and 4 hardware UARTs.
The test was left running for a long period of time, and after 4.000.000 total packets there weren’t any loses.
Packet processing time analysis
the next step is to calculate the exact operation timings of the services. The time analysis was performed with the use of SWD and systemview.
Packet pool timestamp
The packet pool module was modified, so when a packet was used a timestamp field was updated, with the current time. When the same packet was about to get released, the difference of the timestamp and the current time, showed the time spend on the packet processing. Tests were made with different service packets and they result was 1ms. The timer used for time keeping has resolution of 1ms, so the processing time could have been less than 1ms.
The tests had 2 versions. First the OBC was in running mode, having a breakpoint after the time calculation were performed. After the time was noted, the OBC was put in running mode again, waiting to test another packet. This allowed to examine each packet’s timings individually. In the second version, the OBC was in running mode and the times of each packet was displayed in “live mode”. Live mode was a debugging mode of the SWD that allowed variables to be displayed without stopping the program. The only issue was that the update of the values was a bit slow taking 1-2 seconds. Even though there was loss of information due to the delay, that way enabled to get an indication for nonstop operation.
Systemview
Tests performed with systemview gave a perfect view of the OBC internals. Systemview has a great advantage that it’s use on the system has minimal impact.
Tests were performed with the OBC standalone, OBC connect with other subsystems in the UPSat testing stack and finally in the live satellite.
With the aid of systemview, a bug was found, due to the nature of the bug it would be impossible to find without systemview.
When a new packet arrives, the interrupt responsible for packet reception signals the FreeRTOS scheduler to make a task switch if necessary, to the UART task, so the packet is processed as soon as possible. An instruction necessary for the signaling was omitted so after a new packet arrived, the UART task was put on the tasks ready list but it started running after a variable time of 1-400ms and not immediately. When the instruction was added the issue was solved and the task run instantly.


Image 5.6 UPSat systemview Image 5.7 UPSat systemview testing

Figure 5.6 OBC extended WOD communications
As it was suggested from previous findings, most of the packets showed a processing time less than 1ms.
A surprising finding was that the idle time of the microcontroller in normal operation, was close to 100\%. Even though it was hoped that the service operation would be fast, it didn’t suspect to be that fast. In normal operation, the OBC handles tasks like housekeeping, logging etc.
From the start of the project, one of my main concerns, was the behavior of the SD card and particularly the timing in relation with other modules.
From the start the mass storage, was expected to break the real-time constraints of the OBC and the tests verified it. Unfortunately, there wasn’t much that could be have done in the projects time restrictions.
Real time constraints are broken only when the ground station interacts with the mass storage service. In housekeeping, the mass storage runs in the housekeeping task and it doesn’t affect processing of the incoming packets. When the ground station, searches, uploads or downloads files there is a delay of ~100ms.
With more careful analysis, the breaking of the real-time constraints resolves to a minor issue. The reason is that this happens only with ground station interaction, when there is communication with the earth, the housekeeping activity is suspended, so there aren’t any logs lost. there isn’t an issue for packet loss since the ground station initiates the communication, even if there is packet loss the ground user should request again the information. In any case the time delay of the mass storage is very small for a human. Finally, the communication window is very small compared to normal operation.
Tests were also made for timing in searching/storing/loading files, with different number of files in storage, from 0 to the maximum of 5000 files in a mass service store. These tests were made, in order to examine if timing was relative to the number of files present in the store. The results showed no change in timings.

Figure 5.7 Delay before task notification fix

Figure 5.8 Delay after task notification fix

Figure 5.9 Mass storage service WOD storage
ECSS statistics
During the early testing phase, it was easily found using techniques discussed in the previous sections, that there weren’t any packet losses. But as the subsystem integrated and UPSat became more complex and the previous techniques couldn’t longer be used, there was a need to discover if there were packet losses after hours of continuous operation. For that reason, the ECSS statistics module was created.
The implementation was very easy: every subsystem has 2 arrays for incoming and outgoing packets. Each cell of the array holds a counter that corresponds to a subsystem. Every time a packet is received or transmitted the counter is received. By comparing the incoming and outgoing counters in the subsystems it would be possible to figure if there were packet losses e.g. if the ADCS had send to the EPS 6 packets but the EPS had received only 4, there would be 2 packets missing.
The housekeeping service was used to send the statistics to the operator during testing. The ECSS statistics were given a unique structure ID and they were configured to transmit the information every 60 seconds during the testing phase. The ECSS statistics functionality was left after the testing phases finished but the information is only send per operator request and automatically.
Unfortunately, there wasn’t enough time to fully analyze the statistics during testing but some early results showed no significant packet loss.
System operation test
During orbit, UPSat would have to continuously operate for months. In order to simulate that condition and to check for bugs that might happen after a while, UPSat was
The state of the UPSat was determined by WOD and extended WOD.
WOD and extended WOD was continuously collected through the umbilical and RF communication, examined and logged.
The first check was to see if a subsystem had a reset and what was the reason. Periodically UPSat was tested for correct operation through the command and control module. The tests included test service operation in all subsystems, health checks and correct logging of housekeeping in mass storage.
Systemview was running along the system operation test, for further examination, in case there was an error.
The logs where analyzed by the team by using a custom python script that plotted UPSat parameters.


Image 5.8 UPSat systemview testing operation Image 5.9 UPSat systemview operational plot

Image 5.10 UPSat extended WOD operational plot
Functional tests
One of the QB50 requirements were the validation of functionality before and after various tests (TVAC, vibration etc) with the use of functional tests. QB50 states a generic description of the tests and it’s up to the team to implement it.
In most cases, e.g. when verification that the subsystem is operational the test service is used. In some cases, the tests weren’t applicable to UPSat so they weren’t implemented.
e2e tests
QB50 required to run a set of tests that prove that SU is handled properly. These tests included time handling, SU script upload and load, SU script running on time, SU logs stored and verification of correct operation by downloading SU logs through mass storage service and analysis.
Even though these tests are for the SU by running them, all system functionality is tested. After all, UPSat primary exists for the SU operation: EPS SU power management, RF communication, ground station operation, ECSS services mass storage etc, OBC RTOS task timing, proper script handling and finally the SU interface.
One issue that was discovered during the e2e tests, with the aid of systemview, was that sometimes the SU script engine task run delayed. This was due to different priorities in the task that had the script engine and the task that kept the timing. It was corrected by signaling a task switch. Since the delay start of the task happened randomly, without systemview it would have been impossible to discover the exact nature of the bug.

Image 5.11 During S.U. E2E tests
Table 5.1 Functional test list and description
Test ID Test Verification Description ——— —————————————————————————————————————— OBC01 Verify that EPS supplies power to OBC board OBC02 Verify that OBC receives power and commands through umbilical connector OBC03 Verify that OBC transmits data to COMM subsystem. OBC04 Verify that OBC receives and stores in the memory data from COMM subsystem. OBC05 Verify that OBC can access and read data stored in memory. OBC06 Verify that OBC can read, store and transmit to COMM sub-system, data coming from sensors or subsystems boarded. COM08 Verify that COMM subsystem transmits signals to OBC. COM09 Verify that transceiver decodes the received signals into the expected data format. COM10 Verify that transceiver encodes the received signals from OBC into the expected data format. COM12 Verify the capability to shut down the transmitter after receiving the transmitter shutdown command. COM13 Verify that a power reboot doesn’t re-enable the transmitter after receiving the shutdown command. COM16 Verify beacon timing and transmitted data. COM17 Verify and establish communications with the ground station. EPS02 Verify battery voltage both with GSE and by telemetry data reading. EPS04 Verify battery voltage both with GSE and by telemetry data reading after a complete charge and discharge cycle. EPS05 Verify battery temperature readings by telemetry. EPS09 Verify that solar panels provide expected voltage and power outputs when enlightened. ACS01 Verify that power is supplied to ADCS board(s). ACS02 Verify capability to enable/disable power to ADCS. ACS03 Verify magnetic field intensity measurements of magnetometers. ACS04 Verify that power is supplied to magneto-torquers. ACS05 Verify the capability to enable/disable power to coils. ACS06 Verify polarity of magneto-torquers. ACS08 Verify that ADCS sensors data are consistent (gyroscopes, accelerometers, etc). ACS09 Verify power supplying to GPS antenna. ACS10 Verify GPS telemetry. ACS11 Verify that power is supplied to momentum wheels. PLU01 Verify power supplying to the payload. PLU02 Verify that payload unit receives signals from OBC. PLU04 Verify that OBC is capable to enable/disable power to the payload unit. SEU04 Verify that OBC is capable to enable/disable power to the payload unit.
Environmental testing
Among the software tests, in order to be eligible to launch, UPSat needed to pass environmental testing.
Thermal vacuum testing, simulates the conditions in space. The tests are different thermal scenarios: heating, cooling, and cycles of cool and heat, while UPSat resides in vacuum.


Image 5.12 TVAC chamber with UPSat Image 5.13 TVAC results
————————————————————————————– ———————————————————————————————-


Image 5.14 UPSat vibration test pod Image 5.15 UPSat subsystem thermal inspection ————————————————————————————————————————————————————————————-
Testing campaign
In this section, an overview of the testing, will be described.
In the beginning the first tests for ECSS modules, were made with unit testing. Also, some concepts and the subsystems peripherals were tested, in the development kit and early phase PCBs.
As the design became more mature, tests happened with the use of SWD. The use of assertions made testing a lot easier. Using a python script and later packetcraft, ECSS services were tested. The combination of SWD and packetcraft gave a better understanding of the systems behavior. Using custom code, timings were measured. As packetcraft got to its limitations, the SatNOGS client command and control module was developed.
In order to get the complete view of the subsystems behaviour and perform timing analysis, systemview was used. Systemview gave task timings and ECSS modules events display with almost no disturbance in the system. It was first used in each subsystem separately and as integration finished, it was used in all subsystems simultaneously.
As the SU e2e tests were mandatory from QB50, were also used to stress the UPSat. Finally, UPSat was left operating in normal conditions, for several days with continuous monitoring and command and control testing.
Conclusions
During the development of UPSat, there was a phrase that you could hear a lot: “we will do this in the next satellite”, meaning all the features that we wanted to implement but we couldn’t due to the time constraints.
Managing to make a CubeSat in approximately 6 months starting almost from scratch especially in software, was a herculean task and I am not suggesting it to anyone. Indeed, most of the people working managed to sleep very little during these six months, including my shelf.
After UPSat passed all the tests and was successful delivered to Isispace, the first CubeSat of the QB50 program and in total of 35 CubeSats, we all felt a sense of relief accompanied with exhaustion along with a thirst for more.
In this final chapter, we will discuss the key points that made this project successful, the things we wanted to add or refactor and the things we hope to make in the future.
Project key points
In my opinion, the success of the project can be attributed to some key points:
-
Assertions and use of JPL’s 10 rules.
-
The use of the ECSS standard.
-
Systemview and J-link.
-
The people comprising the team.
-
The use of FreeRTOS.
-
Good design of the project with software modularity and re usability.
The use of assertions made possible to catch many early errors, plus some bugs that otherwise would be difficult to find. The use of one global error handling function made easier to debug in real time.
The general adoption of the 10 rules made design easier since it provided a general guideline even if we didn’t always follow the rules due to the strict times. It is worth mentioning that rule 4 and 5 were validated from our experience. Indeed, the only functions that were larger that 60 lines were the most difficult to work with parts of the software and most functions had at least 2 assertions.
Using the ECSS specification we had a well-tested template for the command and control design while we didn’t have to made a protocol from scratch. Due to the great structure of the specification we didn’t worry if the design was safe enough to use.
With systemview, the system behavior analysis become a breeze, while having the system behaving as close to production code as possible. Systemview allowed to debug and test the system in a more efficient way than other techniques used before.
Working with FreeRTOS was easier than it was thought before I start the project. The only issues were resets due to stack overflow. That behavior was easily identified and with some trial and error, the correct stack parameters were found. The only bug that was found in FreeRTOS, was an assertion on memory release, that wasn’t allowed due to heap 1 usage.
The design of software with modularity and fault containment in mind simplified the fault tolerance approach while made testing easier.
Finally, the people comprising the team were a good match, with the right technical skills and attitude. Even if communication wasn’t the best at time due to the frantic rhythms there were always good faith that allowed to resolve disputes and continue working.
Simplicity
As a general feeling that I had reading all the literature about safety critical code and after finishing the project was a sense that simplicity is key when designing for safety critical. Simple software and hardware designs lead to better clarity, showing better the design intention, less misconceptions and finally software less prone to bugs. Sure, some designs can have better performance and less lines of code but that could lead to undefined behaviours in C, a situation that isn’t always understood by C developers and less safe code. Complex designs in tented for fault tolerant systems could introduce faults in the systems by adding to the level of complexity.
In my opinion safe is intertwined with simplicity.
Refactor
Things I’ve should have done if I knew better:
Start developing the SatNOGS client from the start, in order to use it for testing. There was too much effort put in packetcraft, that it was later in the project aborted. That would had saved valuable time.
The developers used different environments for the development, from the ST’s libraries to compiler versions compilers and operating systems. That could lead to introduction of subtle errors that would had been very difficult to discover. It also made testing different subsystems difficult since different settings would had been used, wasting time that would had been used in more testing. The solution to that would had been to share a virtual machine image with all the tools used installed, that would had given the same environment, minimizing error introduced from different versions.
Adding mass storage in all subsystems. That would have allowed that every subsystem could store configuration parameters and events.
One of the most difficult part of the development was the design and implementation of the mass storage service. The use of the FAT file system FatFS library was partial responsible due to the nature of FAT file system that is unsuitable for the project and the insufficient documentation of the library.
Use of FreeRTOS in all subsystems. that would had minimized development time used in designing simple task handlers and would lead to simpler designs with tasks. The only reason that we didn’t used FreeRTOS from the start was because we didn’t had the experience working with it and didn’t wanted to take the risk.
Definitely more testing and automation. Unit testing, hardware in the loop, testing integration of SatNOGS client and systemview. Testing is never enough.
Implementation of the event services used with mass storage in all subsystems. This will allow better monitoring and debugging in the case of failures during orbit.
Adding more hardware and software fault tolerance. In UPSat due to the time restrictions, fault tolerance was at a minimum level.
Future work
“At present software is lagging behind hardware in modularity and reusability, and represents the largest hurdle to delivering CubeSat missions.” [19] Derived from our experience from the participation of UPSat which was designed from scratch, this a perfect representation of the state of software for a CubeSat mission implementation. If you take into consideration the trend to shift the fault tolerance from hardware to software, this makes it critical to provide better software in order to make space development easier.
With that in mind, together with the experience accumulated from UPSat design my goal is to create a software framework that handles all the low-level fault tolerance and radiation protection, so that the operator focuses in the mission development. Using the framework will provide more reliability thus making CubeSat a target for more difficult missions away from the protected LEO.
Finally, I would like to think that our work contributed back to the community and will provide the future engineer a reference in the design so he won’t fail in the same pitfalls as us and won’t have to reinvent the wheel.
Godspeed UPSat

Image 6.1 Some people of the team, the day before the delivery

Image 6.2 UPSat during the final tests before delivery

Image 6.3 UPSat in the Nanorack’s deployment pod.

Image 6.4 UPSat

Image 6.5 the CYGNUS supply ship that had UPSat, before docking to ISS

Image 6.6 UPSat along with 2 other CubeSats released from ISS
REFERENCES
- https://github.com/librespacefoundation/packetcraft.
-
https://hackernoon.com/so-you-think-you-know-c-8d4e2cd6f6a6.j5lzd64lt.
-
https://librespacefoundation.org/.
-
https://network.SatNOGS.org/.
-
https://riot-os.org/.
-
https://upsat.gr/.
-
https://www.micrium.com/rtos/.
-
https://www.qb50.eu/.
-
https://www.segger.com/systemview.html.
-
https://www.vki.ac.be/index.php/news-topmenu-238/318-qb50-project.
-
http://www.freertos.org/.
-
http://www.nanosats.eu/.
-
http://www.throwtheswitch.org/unity/.
-
http://www.ti.com/lit/ds/symlink/cc1120.pdf.
-
http://www.windriver.com/products/vxworks/.
-
JPL Institutional Coding Standard for the C Programming Language.
-
MISRA-C:2004.
-
Small Spacecraft Technology State of the Art.
-
Whole Orbit Data Packet Format.
-
Ben cheLf AnDY chou BRYAn fuLton-seth hALLem chARLes henRi GRos AsYA
KAmsKY scott mcPeAK AL BesseY, Ken BLocK and DAWson enGLeR. A few Billion Lines of code Later using static Analysis to find Bugs in the Real World.
- Ken Y. Oyadomari Cedric Priscal-Rogan S. Shimmin Oriol Tintore Gazulla Jasper
L. Wolfe. Alberto Guillen Salas, Watson Attai. PHONESAT IN-FLIGHT EXPERIENCE
RESULTS.
-
Barr. Embedded C Coding Standard.
-
Ted Choueiri Benoit Cosandier, Florian George. SwissCube Flight Software Architecture.
-
Allan H. Johnston Bruce E. Pritchard, Gary M. Swift. Radiation Effects Predicted,
Observed, and Compared for Spacecraft Systems.
-
Ricky W. Butler. A Primer on Architectural Level Fault Tolerance.
-
Checksum. https://en.wikipedia.org/wiki/checksum.
-
CMOCKA. https://cmocka.org/.
-
Priya Narasimhan. Daniel P. Siewiorek. FAULT-TOLERANT ARCHITECTURES FOR
SPACE AND AVIONICS APPLICATIONS.
- Michael Dowd. How Rad Hard Do You Need? The Changing Approach To Space
Parts Selection?
-
ESA. C and C++ Coding Standards.
-
FatFS. http://elm-chan.org/fsw/ff/00index e .html.
-
Fat file system. http://rtcmagazine.com/articles/view/100892.
-
Jr. Frederick P. Brooks. No silver bullet: essence and accident in software engineering.
-
GomSpace. http://gomspace.com/.
-
André Emile Heunis. Design and Implementation of Generic Flight Software for a CubeSat.
-
Gerard J. Holzmann. Code Clarity.
-
Gerard J. Holzmann. Landing a Spacecraft on Mars.
-
Gerard J. Holzmann. The Power of Ten Rules for Developing Safety Critical Code.
-
Thomas Honold.Seventeen steps tohttp://www.embedded.com/design/programming-languages-and-tools/4215552/seventeen-steps-to-safer-c-code.
-
Diaa Jadaan. Memory management and error handling in FreeRTOS for a CubeSat project.
-
Robert E. Lombardi Kelly A. Long Justin J. Likar, Stephen E. Stone. Novel Radiation Design Approach for CubeSat Based Missions.
-
D. L. Wood J. H. Beall P. P. Shirvani N. Oh E. J. McCluskey M. N. Lovellette, K. S. Wood. Strategies for Fault-Tolerant, Space-Based Computing: Lessons Learned from the ARGOS Testbed.
-
Gerard J. Holzmann Michael McDougall. Experience using The Power of Ten coding rules.
-
Nicolas Steiner Ted Choueiri Florian George Guillaume Roethlisberger Noémy Scheidegger Hervé Peter-Contesse Maurice Borgeaud Renato Krpoun Herbert Shea Muriel Noca,Fabien Jordan. Lessons Learned from the First Swiss Pico-Satellite: SwissCube.
-
NASA. C STYLE GUIDE.
-
Critical Design Overview. I-INSPIRE.
-
John Penix. Peter C. Mehlitz. Design for Verification with Dynamic Assertions.
-
John Penix. Peter C. Mehlitz. Expecting the Unexpected: Radiation Hardened Software.
-
Michel PIGNOL. COTS-based Applications in Space Avionics.
-
David Ratter. FPGAs ON MARS.
-
Mark N. Martin Richard H. Maurer, Martin E. Fraeman and David R. Roth. Harsh Environments: Space Radiation Environment, Effects, and Mitigation.
-
JEROD SANTO.https://changelog.com/posts/one-sure-fire-way-to-improve-your-coding.
-
Ground systems and operations. Telemetry and telecommand packet utilization.
-
Yung-Fu Tsai Yun-Peng Tsai Jia-Shing Sheu. Tai-Lin Kuo, Jyh-Ching Juanq. Flight Software Development for a University Microsatellite.
-
Christian Dietrich Horst Schirmeier Martin Hoffmann-Olaf Spinczyk Daniel Lohmann Flávio Rech Wagner Thiago Santini, Christoph Borchert and Paolo Rech. Evaluating the Radiation Reliability of Dependability-Oriented Real-Time Operating Systems.
-
Wilfredo Langley Torres-Pomales. Software Fault Tolerance: A Tutorial.
-
Wikipedia. https://en.wikipedia.org/wiki/airdatainertialreferenceunit.
-
Wikipedia. https://en.wikipedia.org/wiki/faulttolerance.
-
Wikipedia. https://en.wikipedia.org/wiki/fileallocationtable.
-
Wikipedia. https://en.wikipedia.org/wiki/high-leveldatalinkcontrol.
-
Wikipedia. https://en.wikipedia.org/wiki/real-timecomputing.
-
Alvin Cheung Zhihao Jia Nickolai Zeldovich-M. Frans Kaashoek Xi Wang, Haogang Chen. Undefined Behavior: What Happened to My Code.
-
M. Frans Kaashoek Armando Solar-Lezama. Xi Wang, Nickolai Zeldovich. Towards Optimization-Safe Systems: Analyzing the Impact of Undefined Behavior.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.